技術比較
EMI、磁界、クリーンルーム適合性: 技術比較
アクチュエータ技術間の電磁干渉、漂遊磁界、パーティクル発生、アウトガスに関する定量分析
EMI、磁界、クリーンルーム適合性: 技術比較
一般的な産業環境では、モータの電磁特性やパーティクル特性が技術選定に影響を与えることは稀である。モータは筐体内に収められ、ケーブルはコンジット内を通り、工場の空気にはモータ由来の微量なパーティクルが問題にならないほどの粒子が含まれている。
精密アプリケーションは事情が異なる。電子顕微鏡は0.1マイクロテスラ(1ミリガウス)を超える漂遊磁界に耐えられない。半導体ファブは0.1マイクロメートルサイズで立方メートルあたり100個以下のパーティクル数を要求する(詳細は真空・クリーンルーム運用を参照)。MRIスイートは厳格な磁場均一性ゾーンを規定する。高感度RF受信機はマイクロボルトレベルの伝導性放射を検出する。
これらの環境では、モータ技術は性能の問題であると同時に適合性の問題となる。技術選定フレームワークでは、環境を5つの判定基準の一つとして扱っている。本稿では、5種類のアクチュエータ技術について、漂遊磁界、電磁干渉(EMI)、パーティクル発生、アウトガスの4つの環境パラメータにわたる測定値と実用的な閾値を提供する。

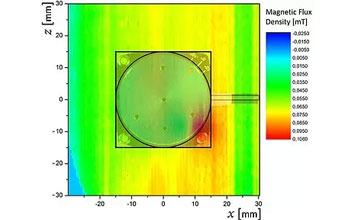
画像: Physik Instrumente (PI)
漂遊磁界
磁界放射源
すべての電磁モータは永久磁石と通電導体の二種類の磁界源を含む。
永久磁石(通常NdFeBまたはSmCo)は、モータの動作有無に関係なく常に存在する静的(DC)磁界を発生させる。距離に対する磁界強度は磁石の形状、磁化、シールドに依存する。双極子近似では、磁界は1/r^3(rは磁石中心からの距離)で減衰する。
通電導体は電流に比例する磁界を発生させる。適切に設計されたモータでは、導体配置により遠方界で異なる導体からの磁界が部分的に相殺されるが、完全な相殺はできない。電流ループからの磁界は1/r^2で減衰する。
圧電アクチュエータは静的動作時に永久磁石も通電コイルも含まない。運動時には圧電ドライバケーブルが電流を流すが、ほとんどの磁気感度の高い機器で問題となる低周波数(DCから数kHz)ではなく、超音波周波数(20から200 kHz)である。
技術別の測定磁界値
以下の値はモータ中心から100 mmの距離での典型的な漂遊磁束密度であり、フラックスゲート磁力計で測定した代表値である。特定の製品は設計に応じて2から5倍の範囲で変動する。
| 技術 | DC磁界 (磁石由来) | AC磁界 (電流由来、定格動作時) |
|---|---|---|
| ステッパーモータ (NEMA 17) | 0.5~2 mT | 0.1~0.5 mT (ステップ周波数) |
| サーボモータ (60 mmフレーム BLDC) | 0.3~1.5 mT | 0.05~0.3 mT (整流周波数) |
| ボイスコイルアクチュエータ | 1~5 mT | 0.01~0.1 mT |
| ダイレクトドライブリニアサーボ (アイアンコア) | 2~10 mT | 0.1~1 mT |
| ダイレクトドライブリニアサーボ (アイアンレス) | 0.5~3 mT | 0.05~0.2 mT |
| 圧電モータ | < 0.001 mT | < 0.01 mT (超音波周波数) |
| 圧電スタックアクチュエータ | < 0.001 mT | < 0.001 mT |
環境閾値
電子顕微鏡 (SEM, TEM): カラム位置での最大許容AC磁場外乱は、機器と必要な分解能に応じて通常0.03から0.1マイクロテスラ(0.3から1ミリガウス)。100倍の倍率では0.1マイクロテスラの磁界による像歪みは無視可能。100,000倍では可視的なビーム偏向が生じる。
カラム位置で0.1マイクロテスラの要件を満たすには、電磁モータは以下のいずれかが必要:
- カラムから十分な距離(モータサイズに応じて通常0.5から2 m)
- 磁気シールドで囲む(ミューメタル、1から3層、20から60 dBの減衰)
- 非磁性アクチュエータに交換
圧電モータと圧電スタックは10 mm以下の距離でもシールドなしで0.1マイクロテスラの閾値を満たす。
SQUID磁力計: SQUIDはフェムトテスラ範囲の磁界を検出する。数メートル以内の永久磁石は問題となる。「非磁性」材料(ステンレスねじ、ニッケルめっきコネクタなど)でさえ測定を妨害する可能性がある。完全に非磁性な構造(チタン、セラミック、アルミニウム、プラスチック)の圧電アクチュエータが、SQUIDシステムで使用可能な唯一のモータ技術である。
MRI環境: MRI室内では強磁性材料は安全上の危険(飛翔体リスク)と磁場均一性の懸念の両方がある。MRI対応モータは非強磁性でなければならない。空気圧アクチュエータと超音波圧電モータが二つの標準的な解決策である。サーボモータとステッパーモータは、非磁性伝達リンケージを介してMRI室外に配置しない限り、完全に除外される。
原子トラップとイオントラップ: 0.1から10マイクロテスラの磁界安定性が求められることが一般的である。トラップ領域から0.5 m以内の電磁モータには、アクティブ磁場キャンセレーションまたは磁気シールドが必要となる。圧電モータおよび圧電スタックは、シールドなしでこれらのシステムに日常的に使用されている。
シールドオプションとコスト
電磁モータを磁気感度の高い環境で使用しなければならない場合、シールドが標準的な緩和策となる。
ミューメタルエンクロージャ: DC及び低周波AC磁界に対して1層あたり20から40 dBの減衰を提供する高透磁率ニッケル鉄合金の1から3層。コスト: モータサイズとシールド効果に応じて$500から$5,000/モータ。重量: モータ重量の50%から200%を追加。
アクティブキャンセレーション: フィードバック磁力計で駆動するヘルムホルツコイルまたはサドルコイルにより、フィードバック帯域幅(通常100 Hzから1 kHz)以下の周波数で20から40 dBの減衰。コスト: カスタムキャンセレーションシステムで$2,000から$20,000。
距離: 最もシンプルな緩和策。モータを3倍遠ざけると磁界は約27倍減少(双極子の1/r^3)。100 mmで1 mTの漂遊磁界のモータは300 mmで約0.037 mT。コストゼロだが機械的に実用的でない場合がある。
エンジニアリング上の洞察として、$200のステッパーモータに$2,000のミューメタルエンクロージャでシールドするよりも、シールド不要な$3,000の圧電モータステージに交換する方がコスト効率が高いことが多い。
画像: Physik Instrumente (PI)
電磁干渉 (EMI)
EMIは伝導性放射(電源および信号ケーブル上のノイズ)と放射性放射(モータおよびケーブルからの電磁波)の両方を含む。高感度機器(RF受信機、精密ADC、ロックインアンプ、NMRプローブ)は近接するモータからのEMIにより妨害される可能性がある。
技術別のEMI源
ステッパーモータ: 20から100 kHzで切替えるチョッパ電流H-ブリッジドライバで駆動。各切替えイベントが切替え周波数から100 MHz以上に及ぶ広帯域EMIを発生。ケーブル上の伝導性放射は150 kHzから30 MHz範囲で通常50から80 dBuV(フィルタ前)。
サーボモータ: ステッパーと類似だが、切替え周波数が高い(10から100 kHz PWM)ことが多く、電力も大きい。磁場配向制御(FOC)ドライブはステッパードライバより低高調波のクリーンな電流波形を生成。伝導性放射: 40から70 dBuV(150 kHzから30 MHz)。
ボイスコイルアクチュエータ: リニアアンプまたは低周波PWMで駆動。リニアアンプのEMIは最小限。伝導性放射(リニアドライバ): 20から40 dBuV。伝導性放射(PWMドライバ): 40から60 dBuV。
圧電スタックアクチュエータ: リニア高電圧アンプ(小信号用)またはスイッチングモードアンプ(大電力用)で駆動。リニアアンプは電気的に極めて静粛。スイッチングモード圧電アンプは50から500 kHzで動作し、40から60 dBuVの伝導性放射を発生。高電圧ケーブル(100から150 V)は適切にシールドしないと放射の原因となる。
超音波圧電モータ: ドライバはセラミック共振器を励振する高周波信号(20から200 kHz、通常10から50 V)を生成。スペクトル成分は共振周波数とその高調波の周辺の狭い帯域に集中する。伝導性放射: 30から50 dBuV。広帯域ではなく離散周波数に集中。チョッパ電流モータドライバの広帯域EMIよりもフィルタが容易な狭帯域特性。
EMI緩和策
シールドケーブル: 最も効果的な単一対策。適切に接地されたシールド付きモータケーブルにより放射性放射を30から60 dB低減。コスト: 非シールドケーブルに対してメートルあたり$5から$20の追加。
フェライトコア: モータケーブル上のコモンモードチョークにより1から100 MHzで10から20 dBの高周波伝導性放射抑制。コスト: ケーブルあたり$2から$10。
EMIフィルタ: モータドライバ出力のLCまたはπフィルタにより切替え高調波を抑制。フィルタ次数と周波数に応じて20から60 dBの減衰。コスト: $10から$100。
物理的分離: 距離が倍になるごとに放射電界強度は6 dB低下。モータドライバを感度の高い電子機器から1 m離すことが最もシンプルで効果的なEMI緩和策であることが多い。
リニアアンプ: 最も高感度なアプリケーションでは、リニア(非スイッチング)アンプでアクチュエータを駆動することで、スイッチングEMIを完全に排除できる。ボイスコイルおよび圧電スタック用のリニアアンプが利用可能。効率はスイッチングタイプ(85%から95%)に比べて低く(40%から60%)、発熱も大きい。
クリーンルーム適合性: パーティクル発生
モーションシステムのパーティクル源
- 摺動接触: ボールねじナット、リードスクリューナット、リニアガイドの循環ボールベアリング、モータブラシ(ある場合)。
- 潤滑剤劣化: グリースやオイルの経時劣化による揮発性有機化合物とパーティクル残渣の生成。
- ケーブル屈曲: ステージ運動時のケーブル曲げによる絶縁材やジャケット材の表面摩耗パーティクル。
- 摩擦駆動接触 (圧電モータ): 超音波圧電モータにおけるセラミック対セラミックまたはセラミック対金属接触からの摩耗残渣。
- アウトガス凝縮: 接着剤、ポッティング材、プラスチック部品からの揮発性化合物が近接表面に分子汚染として凝縮。
技術別パーティクル発生率
| 技術 | パーティクル源 | パーティクル/分 (> 0.1 um) | 達成可能クリーンルームクラス |
|---|---|---|---|
| ステッパー+リードスクリュー+ボールガイド | ねじナット、ガイドボール | 100~10,000 | ISO 5~7 |
| ステッパー+リードスクリュー+フレクシャガイド | ねじナット、ケーブル屈曲 | 10~1,000 | ISO 4~6 |
| サーボ+ボールねじ+ボールガイド | ねじナット、ガイドボール、モータベアリング | 100~10,000 | ISO 5~7 |
| サーボ+ボールねじ+フレクシャガイド | ねじナット、ケーブル屈曲 | 10~1,000 | ISO 4~6 |
| ダイレクトドライブサーボ+エアベアリング | ケーブル屈曲、エア供給パーティクル | 1~100 | ISO 3~5 |
| ボイスコイル+フレクシャ | ケーブル屈曲 | 1~50 | ISO 3~5 |
| 圧電モータ+フレクシャガイド (短ストローク) | 摩擦接触、ケーブル屈曲 | 1~100 | ISO 3~5 |
| 圧電モータ+クロスローラーガイド (長ストローク) | 摩擦接触、ローラーガイド、ケーブル | 10~500 | ISO 4~6 |
| 圧電スタック+フレクシャ | ケーブル屈曲のみ | 0.1~10 | ISO 2~4 |
主要な観察
ボールねじが支配的なパーティクル源である。循環ボール機構が潤滑剤とボール表面材を継続的に研削する。ISO Class 5以上のクリーン環境ではボールねじにはエンクロージャと排気、またはダイレクトドライブアーキテクチャへの置き換えが必要。
圧電モータの摩擦接触はパーティクルを発生させるが、接触面積がはるかに小さく、速度が低く、セラミック材料がスチールより硬いため、ボールねじの10分の1から100分の1の量。ただし、パーティクルはセラミック(アルミナ、ジルコニア)であり、金属パーティクルより硬く研磨性が高い可能性がある。
フレクシャガイド式圧電スタックステージは摺動接触がゼロであるため、最もクリーンな選択肢。パーティクル源はケーブル屈曲と、スタックおよびフレクシャアセンブリ内の接着剤からのアウトガス凝縮のみ。適切な材料選定でISO Class 2の適合性が達成可能。
ケーブル管理は見落とされがちなパーティクル源であり、すべての技術に等しく影響する。10本のケーブルを持つケーブルキャリア(エナジーチェーン)が1 Hzで循環すると、毎分100から1,000個のパーティクルを発生させ得る。対策としては、フラットフレックスケーブル(丸ケーブルよりパーティクルが少ない)、PTFEライナー付きケーブルトラック、またはケーブルフリー設計(多軸システムでは通常実用的でない)がある。
クリーンルーム設計の推奨
ISO Class 7 (Class 10,000) 以下: 標準的な予防措置(クリーンルーム対応グリース、密封ベアリング、カバー付きケーブルキャリア)ですべてのモータ技術が使用可能。
ISO Class 5 (Class 100): 可能ならボールねじを避ける。フレクシャガイドまたはエアベアリングステージを使用。圧電モータステージ(フレクシャガイド付き)が好適。
ISO Class 4 (Class 10) 以上: フレクシャガイド圧電スタック、エアベアリングステージ、またはフレクシャガイド付きボイスコイルステージを使用。ケーブル運動を最小化。文書化されたクリーンルーム適合性を持つ材料を選定。
ISO Class 3 (Class 1): すべての部品が重要。圧電スタックフレクシャステージまたはエアベアリングダイレクトドライブステージを超清浄組立、ベーキング、検証済み材料で使用。
アウトガス
アウトガスは真空システム(アウトガスが真空度を劣化させる)とクリーンルーム環境(分子汚染が製品表面に堆積する)の二つのコンテキストで重要となる。
アウトガス源
アクチュエータアセンブリの主なアウトガス源は以下の通り:
- 接着剤: エポキシ、シアノアクリレート、シリコーン。硬化条件と種類に応じてTML(全質量損失)0.5%から5%。
- 電線絶縁: PVC(高アウトガス)、ポリエチレン(中程度)、ポリイミド/Kapton(低)、PTFE(極めて低)。
- 潤滑剤: 鉱油・リチウムグリース(高)、PFPE(Fomblin/Krytox、低)、MoS2乾式潤滑剤(極めて低)。
- ポッティング材: シリコーンポッティング(シロキサンの高アウトガス)、エポキシポッティング(硬化後中程度)、未充填キャビティ(最低)。
- プラスチック部品: ナイロン、デルリン、ABS(中~高)、PEEK、Vespel、Torlon(低)。
- 圧電セラミック素子: 極めて低いアウトガス。焼結セラミックは標準的な真空ベーキング後、実質的にガスフリー。
技術別アウトガス比較
| 技術 | 主なアウトガス源 | 典型的TML (% 125Cで24h後) | 真空適合性 |
|---|---|---|---|
| ステッパーモータ | 電線絶縁、グリース、ポッティング | 0.5%~2% | 改造によりHV |
| サーボモータ | 電線絶縁、グリース、ポッティング、磁石コーティング | 0.5%~2% | 改造によりHV |
| ボイスコイル | 電線絶縁、接着剤、ポッティング | 0.3%~1.5% | 材料選定によりHV~UHV |
| 圧電モータ (標準) | 摩擦パッド材、接着剤、電線絶縁 | 0.2%~1% | HV |
| 圧電モータ (真空グレード) | 摩擦パッド、セラミック接着剤 | 0.05%~0.3% | UHV (10^-9 mbar) |
| 圧電スタック (標準) | スタック接着剤、電線絶縁 | 0.1%~0.5% | HV |
| 圧電スタック (UHVグレード) | 最小限 (セラミック、金属、ガラス) | < 0.05% | UHV (10^-10 mbar) |
実用的な真空ガイドライン
粗引き真空 (10^-3 mbar以上): 標準的なクリーンルームグレードの潤滑剤と真空定格ケーブルですべての技術が使用可能。
高真空 (10^-3~10^-8 mbar): 標準潤滑剤をPFPEタイプに交換。ポリイミド絶縁ケーブルを使用。80から150度Cで24から48時間のベーキング。ステッパーおよびサーボモータは真空定格バージョン(特殊グリース、真空定格コネクタ、ポッティングなし)が必要。圧電モータおよびスタックは有機材料が少ないため資格認定が容易。
超高真空 (10^-8 mbar以下): 材料ごとの資格認定が必要。UHVグレード圧電スタックはセラミック・金属ろう付け(有機接着剤なし)、ガラス封止電気フィードスルー、ベアセラミック表面を使用。UHV圧電モータは特殊な摩擦材(アルミナ対アルミナなど)とセラミック接着剤を使用。UHVのサーボモータは稀で高価。全金属構造、MoS2乾式潤滑、徹底的なベーキングが必要。
環境別の最適技術
電子顕微鏡 (SEM/TEM/FIB)
主要な懸念: 磁界、振動、EMI。 最適技術: 圧電モータ(試料ステージ、アパーチャ位置決め)または圧電スタック(微動フォーカス、スティグメータ、ビームブランキング)。 根拠: ゼロ磁界放射によりビーム偏向を排除。保持時ゼロ消費電力で熱ドリフトを排除。超音波駆動周波数がビーム偏向回路の帯域幅を超える。 一般的な実装: 現代の電子顕微鏡メーカーの大多数が試料位置決めに圧電ステージを採用している。
半導体製造
主要な懸念: パーティクル、アウトガス、磁界(イオン注入・電子ビームツール用)、速度。 最適技術: ウェーハステージにはエアベアリングダイレクトドライブリニアサーボ(速度とストロークの要件が支配)。レチクルステージ、アライメント、計測には圧電モータまたは圧電スタック(分解能と清浄度が支配)。
MRI対応医療機器
主要な懸念: 磁界(安全性とイメージアーティファクト)、EMI(RFイメージングとの干渉)。 最適技術: 非磁性構造で光ファイバエンコーダ搭載の超音波圧電モータ。 根拠: ゼロ磁性材料、ゼロDC磁界放射、MRI RF帯域幅外の超音波周波数にEMIが集中。
光学計測ラボ
主要な懸念: 振動、温度安定性、EMI(フォトディテクタへの干渉)。 最適技術: サブミリ位置決めに圧電スタック、長距離に圧電モータ。アクティブ除振にボイスコイル。 根拠: ゼロ消費電力保持で熱擾乱を排除。低振動で測定安定性を維持。低EMIで高感度フォトディテクタやロックインアンプへの干渉を回避。
宇宙・人工衛星システム
主要な懸念: アウトガス、消費電力、質量、放射線耐性、磁気清浄度。 最適技術: 機構(アンテナポインティング、機器展開、光学アライメント)に圧電モータ。精密アライメントに圧電スタック。 根拠: ゼロ消費電力保持で宇宙機電力を節約。軽量で打上げコストを低減。低アウトガスで光学面の清浄度を維持。科学機器への磁気干渉なし。
実用的な判定チェックリスト
環境制約のあるアプリケーションでモータ技術を評価する際、以下のチェックリストに従う:
-
モータ近傍に磁界バジェットがあるか? モータ位置で0.01 mT以下のバジェットであれば、シールドなしで圧電技術のみが適格。
-
真空中での使用か? 10^-6 mbar以下であれば、真空グレード構造の圧電モータまたはスタックが望ましい。ベーキングと材料資格認定の予算を計上。
-
ISO Class 5以上のクリーン環境か? ボールねじとリードスクリューを避ける。フレクシャガイドステージを使用。選定したステージの配備前パーティクルテストを検討。
-
高感度RFまたは精密アナログ電子機器の近くか? モータドライバのEMIスペクトルを特性評価。シールドケーブル、フェライトコア、(必要であれば)リニアアンプを使用。
-
モータ周辺の許容熱負荷は? 真空中ではモータからの熱は取付構造を通じた伝導で逃がす必要がある。熱感度の高い光学系では1 Wの連続消費でも測定可能なドリフトを引き起こし得る。
-
モータを遠隔配置できるか? 最善の解決策はモータを感度の高い領域から遠ざけ、機械リンケージ(シャフト、ケーブル、ベルト)で運動を伝達すること。環境適合性と引き換えに機械精度を犠牲にするトレードオフとなる。
最もクリーンで、最も磁気的に静粛で、最も温度安定なモータ技術は「そこにないモータ」である。圧電アクチュエータはその理想に最も近い。磁石なし、連続電流なし、保持時発熱なし、パーティクル最小限、アウトガス最小限。環境がそれを要求する場合、選択は多くの場合明白である。