基礎原理
圧電モーターの仕様を読み解く:データシートが語らないこと
圧電モーターのデータシートを批判的に読み、数値の背後にある試験条件を理解し、適切な質問をするための指針
データシートはマーケティング資料でもある
あらゆる工学的データシートは、技術的情報の伝達と販売促進という2つの役割を担っている。圧電モーターのデータシートに記載された数値は捏造ではないが、モーターが最も優れて見える条件で測定・提示されている。見出しの仕様がすべて同時に、かつ自分の動作条件で達成できると想定してシステムを設計すると、必ず期待を裏切られることになる。
これは圧電モーターメーカー特有の問題ではない。半導体のデータシート、電池の仕様、光学部品のカタログにも同じ構図がある。ただし、圧電モーターには互いに影響し合う仕様が多く、試験条件への依存度が大きく、初心者が想像するものとは微妙に異なる意味を持つ仕様が多いという特徴がある。本記事では、主要な仕様の意味を解説し、数値を良く見せる(あるいは控えめにする)試験条件を説明し、設計に必要な情報を正しく抽出するためのフレームワークを提供する。

Image: Physik Instrumente (PI)
ストール力と動作力
データシートの記載
「最大力:10 N」または「ストール力:10 N」
実際の意味
ストール力は、速度ゼロ時にモーターが発生できる最大の力である。モーターが負荷に対して全力で押しているが動けない状態での値である。ストール時にはモーターは最大電力を消費し、そのすべてがステーターと摩擦界面での熱に変換される。ステーター温度は急速に上昇する。
データシートが語らないこと
- ストール力での連続動作はできない。 ほとんどのモーターは、ストール状態では数秒から数分で過熱し脱分極する。ストール力は過渡的な仕様である。
- 動作力(連続力)はストール力の20%から50%が一般的である。 この範囲の力であれば、過熱せずに無期限に維持できる(温度限界については熱的挙動を参照)。この値を記載するデータシートもあるが、記載しないものも多い。
- 力は速度に依存する。 圧電モーターの力-速度曲線は概ね(ただし正確にはそうではないが)線形である。ゼロ力で最大速度、ストール力でゼロ速度となる。実際の動作点はこの曲線上のどこかに位置する。ストールで10 Nのモーターが、最大速度の半分では6 N程度しか発生できないこともある。
- 力は予圧に依存する。 ステーターをスライダーに押し付ける法線力(予圧)は、利用可能な横方向の力に直接影響する。最大力に対する最適な予圧はモーター設計ごとに異なる。予圧が小さすぎると摩擦結合が低下し力が減少する。大きすぎると静止摩擦と摩耗が増大し、エネルギーを浪費し、ステーターに機械的過負荷を与えて力が低下する場合もある。
- 力は駆動電圧と周波数に依存する。 データシートの力は、最適周波数での最大駆動電圧における値が記載されている可能性が高い。より細かい速度制御のために電圧を下げると、利用可能な力は比例して低下する。
メーカーに確認すべきこと
- 定格デューティサイクルでの連続(定格)力はいくらか。
- データシートの駆動条件における完全な力-速度曲線を提供してもらう。
- 力の仕様に使用された予圧はいくらか。
- 寿命を通じて力はどのように低下するか(摩擦面の摩耗)。
無負荷速度と負荷時速度
データシートの記載
「最大速度:500 mm/s」または「無負荷速度:500 mm/s」
実際の意味
無負荷速度は、モーター自身の機構内の摩擦と慣性が支配的になるほど軽い負荷を動かした場合の最大速度である。運動に抗する外力は実質的にゼロの状態である。
データシートが語らないこと
- 実際のアプリケーションには負荷がある。 負荷がかかると速度は低下する。力-速度曲線が指針となる。動作力がストール力の30%であれば、負荷時速度は無負荷速度の約70%となる(線形の力-速度曲線の場合)。実際の曲線は凹型であることが多く、実際の負荷時速度はさらに低くなる可能性がある。
- 速度は姿勢に依存する。 水平方向に500 mm/sでステージを動かせるモーターでも、同じステージを垂直方向に駆動すると350 mm/s程度になることがある。重力が一定の力負荷として加わるためである。
- 速度は温度に依存する。 動作中にステーターが加熱されると共振周波数がシフトし、駆動回路が完全に追従できない場合がある。連続運転の最初の数分間で、システムが熱平衡に達するまでに速度が5%から15%低下することがある。
- 多くのアプリケーションでは、最高速度より加速度の方が重要である。 最高速度500 mm/sでも加速度が2 m/s^2のモーターは、最大速度に達するまでに250 msかかり、62.5 mmを移動する。移動距離が10 mmであれば最高速度には到達せず、関係する仕様は加速度(力を移動質量で割った値)となる。
メーカーに確認すべきこと
- 見積もり対象のモーターについて、力-速度曲線を提供してもらう。
- 指定のペイロード質量での加速性能はいくらか。
- 指定の速度および負荷での速度安定性(速度リップル)はいくらか。
分解能、繰り返し精度、精度
この3つの用語はしばしば混同される。「分解能」は常に最も見栄えの良い数値であるため、意図的に混同されることもある。これらは異なる特性を測定している。
分解能
データシートの記載: 「分解能:< 1 nm」または「最小ステップサイズ:0.5 nm」
実際の意味: モーターが生成でき、センサーが検出できる最小の運動増分。圧電モーターでは、ステッピングモードでのスティックスリップのステップサイズ、またはサーボモードでのエンコーダ分解能によって決まるのが一般的である。
データシートが語らないこと:
- 分解能はモーターの仕様であると同時にセンサーの仕様でもある。1 nmのエンコーダを搭載したモーターは1 nmの分解能を示す。同じモーターに50 nmのエンコーダを搭載すれば50 nmの分解能になる。モーター自体は何も変わっていない。
- 仕様上の分解能を達成するには、防振環境、温度安定性、適切にチューニングされたコントローラが必要である。一般的な実験室環境(防振テーブルを使用しない場合)では、床振動として10から100 nmが一般的である。1 nm分解能のモーターであっても、この量だけジッターが発生する。
- オープンループステッピングモードでの「分解能」は、モーターがそのサイズの個々のステップを生成できることを意味する。そのサイズの1000回の連続ステップが正確に実行されることを意味するわけではない。ステップサイズは摩擦のばらつき、予圧、表面状態によって変動する。
繰り返し精度
データシートの記載: 「双方向繰り返し精度:+-50 nm」または「単方向繰り返し精度:+-10 nm」
実際の意味: モーターに同じ位置を繰り返し指令したとき、実際の到達位置がどれだけ密集するかを示す指標。単方向繰り返し精度は、毎回同じ方向からアプローチした場合に測定される。双方向繰り返し精度は、両方向からアプローチした場合に測定される。
データシートが語らないこと:
- 双方向繰り返し精度は常に単方向より劣る(システム内のヒステリシスとバックラッシュのため)。一部のメーカーは単方向繰り返し精度のみを記載しており、これは双方向より2倍から10倍良い値となりうる。どちらが記載されているか確認が必要である。
- 繰り返し精度は短い時間スパン(分から時間のオーダー)で測定される。数日から数週間では、ステージ、エンコーダ、取り付け構造体の熱ドリフトが記載値を超える可能性がある。
- 記載の繰り返し精度は、おそらく制御された温度環境下、防振テーブル上で、1つまたは少数の特定位置で測定されたものである。全ストローク範囲にわたる工場環境での繰り返し精度はそれより悪化する。
精度
データシートの記載: 「精度:+-1 um(50 mmストローク)」または「位置精度:+-0.5 um」
実際の意味: 指令位置と真の位置の最大偏差。全ストローク範囲の任意の点で、基準標準器(通常はレーザー干渉計)との比較により検証される。
データシートが語らないこと:
- 精度はモーターではなくエンコーダに支配される。+-0.5 umの精度を持つエンコーダを搭載したモーターは、モーター自体の性能に関係なく、最良でも+-0.5 umの精度となる。
- 精度の仕様は基準温度(通常20 ℃)で測定される。ステージ、スケール、ワークピースの熱膨張が精度を劣化させる。アルミニウムステージの線膨張係数は23 ppm/℃である。ストローク100 mmのアルミニウムステージは1 ℃あたり2.3 um長さが変化し、わずか0.5 ℃の温度変化で記載精度を超える可能性がある。
- 「精度」は「校正後の精度」を意味する場合がある。補正値のルックアップテーブルがコントローラに格納される。未校正(生)の精度は5倍から10倍悪い場合がある。
- アッベ誤差(実際の関心点からオフセットした位置で測定することに起因する誤差)は通常、データシートの精度には含まれない。エンコーダスケールがワークピースから10 mm離れており、ステージに10 uradの角度誤差がある場合、アッベ誤差は100 nmとなり、精度バジェットの主要因となりうる。
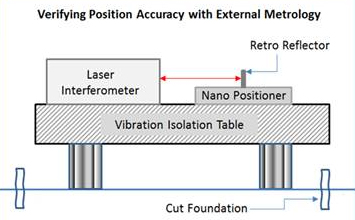
Image: 外部レーザー干渉計による位置精度の検証。試験条件(防振テーブル、温度管理された実験室)は実際のアプリケーションで再現されることはほとんどない。Source: Physik Instrumente (PI)
3つの関係
典型的な圧電駆動リニアステージの仕様は以下のようになる。
- 分解能:1 nm
- 繰り返し精度(双方向):+-50 nm
- 精度:+-1 um
3桁のオーダーにわたる差があることに注目してほしい。このシステムは1 nmの変化を検出でき、同一位置に50 nm以内で繰り返し戻れるが、絶対位置は+-1 umの精度でしかわからない。これらは矛盾していない。位置決め性能の異なる側面を測定しているのである。
ほとんどのアプリケーションでは、繰り返し精度が最も重要な仕様となる。同じ位置に部品を繰り返し位置決めする場合(ウェーハアライメント、光ファイバー結合、ピックアンドプレースなど)に重要なのは繰り返し精度である。精度が重要になるのは、絶対位置の知識が必要な場合(校正済み座標測定など)に限られる。

Image: Physik Instrumente (PI)
寿命と信頼性
データシートの記載
「寿命:> 10,000時間」または「寿命:> 20,000 km」
実際の意味
メーカーの試験条件下で、記載された走行距離または時間の後もモーターが動作(運動を生成)できることを意味する。
データシートが語らないこと
- 「動作可能」は「すべての仕様を満足する」ことと同義ではない。 力、速度、位置精度はいずれも摩擦面の摩耗に伴い劣化する。20,000 kmの時点で「動作」していても、元の力の60%しか発生できない場合がある。
- 寿命は動作条件に大きく依存する。 予圧、デューティサイクル、速度、負荷力、環境(温度、湿度、パーティクル)、駆動条件はすべて摩耗率に影響する。メーカーは最適化された条件で試験している。実際の使用条件はより過酷な場合がある。
- 摩擦面が摩耗部品である。 ほとんどの圧電モーターでは、ステーター上のポリマーまたはセラミックの摩擦パッドが移動面と接触する。このパッドは経時的に摩耗し、予圧、摩擦特性、ひいてはモーター性能を変化させる。パッド交換が可能な設計もあれば、不可能な設計もある。
- 摩耗はパーティクルを発生させる。 クリーンルームや真空環境では、摩擦界面からの摩耗デブリが汚染の懸念となる。パーティクル発生率とその組成が仕様に記載されることはまれである。
メーカーに確認すべきこと
- 寿命仕様の試験条件(予圧、デューティサイクル、速度、負荷、温度)は何か。
- 寿命末期での定量的な性能劣化はどの程度か(例:力50%、速度80%)。
- 摩耗率(走行距離1 kmあたりの材料損失量、マイクロメートル単位)はいくらか。
- 摩擦面は現場で交換可能か。
- パーティクル発生に関するデータはあるか。
保持力と電源オフ時の安定性
データシートの記載
「保持力:20 N」または「電源オフ保持力:15 N」
実際の意味
駆動信号がオフのときにモーターを動かすのに必要な力。ステーターとスライダー間の静止摩擦であり、予圧力、摩擦係数、接触形状によって決定される。
重要性: 圧電モーターは停止時、電力消費ゼロ、発熱ゼロで位置を保持できる。これは、力に抗して位置を保持するために連続的な電流(と熱)を必要とする電磁モーターに対する大きな利点である。真空、極低温、バッテリー駆動のシステムは、電源オフ保持の恩恵を特に受ける。
データシートが語らないこと
- 保持力は予圧に比例する。熱膨張、機械的弛緩、摩耗により予圧が低下すると、保持力も比例して低下する。
- 保持力は静的な仕様である。動的な外乱(振動、衝撃)は瞬間的に静止摩擦を超え、モーターを滑らせる可能性がある。このスリップからの回復には、コントローラが位置変化を検出して能動的に補正する必要がある。
- 垂直方向のアプリケーションでは、保持力が移動質量にかかる重力負荷を超えている必要がある。そうでなければ、電源オフ時にステージが下方に移動してしまう。
仕様を良く見せる試験条件
一般的な試験慣行を認識しておくことで、データシートをより批判的に読めるようになる。
短時間試験。 ストール力、最大速度、加速度は、モーターが加熱する前の短時間のバースト(秒単位)で測定されることが多い。熱的ディレーティングは重大である。連続運転では10%から30%の性能低下を見込むべきである。
最適化された予圧。 メーカーは実施する試験に合わせて予圧を調整する。最大力試験ではより高い予圧、最大速度試験ではより低い予圧が使用される場合がある。量産ステージにおける固定予圧は両者の妥協点である。
実験室環境。 防振光学テーブル上、20.0 ℃ +-0.1 ℃、超清浄な摩擦面での試験。熱サイクル、振動、汚染のある工場フロアではより厳しい結果となる。
単軸での評価。 仕様は、モーターが十分にアライメントされた単一軸を駆動する状態で測定される。実際のマルチ軸システムでのクロスカップリング、ミスアライメント、軸外負荷は性能を低下させる。
N個中ベストの選択。 複数台をテストし、最良の結果を公表するメーカーもある。納品されるモーターは平均的なものであり、最良品ではない可能性がある。
新品状態。 摩擦面が新品の状態のモーターはピーク性能を発揮する。慣らし運転(初期摩耗期間)後に一部の仕様が変化し、長期使用後にはさらに劣化する。データシートの値は通常、新品または軽度に慣らされたモーターの値である。
電気仕様と駆動要件
駆動電圧と電流
「駆動電圧:150 Vpp」は、モーターが必要とするピークツーピーク電圧を示す。駆動回路は、モーターの共振周波数(通常20から200 kHz)でこの電圧を低歪みで供給しなければならない。
見落とされがちな点:
- モーターは抵抗負荷ではなく容量性負荷である。40 kHzで典型的なステーター容量5 nFの場合、無効電流は I = 2 * pi * f * C * V = 2 * 3.14159 * 40000 * 5e-9 * 75 = 94 mA(ピーク)となる。実消費電力ははるかに小さい(抵抗成分のみ)が、アンプは無効電流を供給する能力が必要である。
- 2相モーターでは、正確な振幅と90度の位相関係を持つ2チャンネルの駆動が必要である。わずか数度の位相誤差でも性能が著しく低下する。
- パワーアンプは、駆動周波数の高調波で波形品質を維持するため、駆動周波数より十分に広い帯域幅を持つ必要がある。
消費電力
「消費電力:2 W」は実消費電力(有効電力)であり、熱と機械的仕事に変換される。皮相電力(電圧×電流)は無効成分のためはるかに大きい。電源は実電力ではなく皮相電力に対する定格が必要である。
環境仕様
温度範囲
「動作温度:-20から+70 ℃」は周囲温度の範囲を示す。動作中のステーター温度は自己発熱により周囲温度より高くなる。最大ステーター温度がPZTの脱分極開始点(長期信頼性を考慮するとキュリー温度の50%から70%が目安)に近づくと、性能が低下する。
低温では、PZTの特性が変化する。d係数は低下し、Qmは増加し、共振周波数は上方にシフトする。駆動回路はこの周波数シフトに対応しなければならない。
真空適合性
「真空適合:10^-6 mbarまで」は、モーターが真空中でテストされたことを意味するが、詳細が重要である。
- どのようなアウトガス率(TML、CQCM)が測定されたか。
- モーターにアウトガスする潤滑剤や接着剤が使用されているか。
- 真空中で摩擦界面の摩耗パーティクルが増加しないか(大気中で通常形成される酸化物層が存在しないため、増加することが多い)。
- エンコーダは要求される真空レベルに適合しているか。
磁気クリーンネス
「非磁性」または「磁界放射なし」は圧電モーターの大きなセールスポイントである。ただし、詳細を確認すべきである。
- エンコーダに磁気部品はないか(磁気エンコーダは当然非磁性ではない。一部の光学エンコーダにも磁気取り付け部品がある)。
- 配線とコネクタは非磁性か。
- 指定距離での残留磁界はどの程度か。電子顕微鏡、NMR、MRIなどのアプリケーションでは、特定距離で0.5 mT未満の磁界レベルが要求される場合がある。
メーカーへの質問チェックリスト
圧電モーターの選定にあたり、以下の情報を入手または確認することが望ましい。
- 力-速度曲線。 指定の予圧および駆動条件での曲線。
- 連続(定格)力と速度。 ピーク値ではなく、定格デューティサイクルでの値。
- 試験条件。 すべての仕様に対して、予圧、温度、デューティサイクル、負荷質量、姿勢を確認する。
- エンコーダ仕様(内蔵の場合)。 分解能、精度、繰り返し精度、更新レート、精度が校正済みか未校正かを確認する。
- 寿命データ。 単一の数値ではなく、定量的な劣化曲線を含むデータ。
- 熱的ディレーティング曲線。 ステーター温度に対して力と速度がどのように変化するか。
- 駆動回路の周波数チューニング範囲。 ドライバーがどれだけの共振周波数シフトを追従できるか。
- 予圧機構の詳細。 予圧は調整可能か。温度変化および経時変化に対してどの程度安定か。
- 摩耗パーティクルデータ。 汚染に敏感なアプリケーションの場合。
- アウトガスデータ(TML、CQCM)。 真空動作が必要な場合。
- アプリケーション技術サポート。 メーカーがコントローラの調整やシステム最適化を支援してくれるか。うまく動くモーターと棚に置かれたままのモーターの違いは、この支援の有無にかかっていることが多い。
現実的な性能バジェットの構築
データシートの値を額面どおりに受け取るのではなく、現実的なディレーティングを考慮した性能バジェットを構築することを推奨する。
| パラメータ | データシート値 | 一般的なディレーティング | 動作値 |
|---|---|---|---|
| ストール力 | 10 N | 連続運転で0.3倍から0.5倍 | 連続3から5 N |
| 無負荷速度 | 500 mm/s | 負荷時0.5倍から0.8倍 | 負荷時250から400 mm/s |
| 分解能 | 1 nm | 実環境で10倍から100倍 | 実効10から100 nm |
| 繰り返し精度(双方向) | +-50 nm | 条件により1倍から3倍 | +-50から+-150 nm |
| 精度 | +-1 um | 熱影響含め2倍から5倍 | +-2から+-5 um |
| 寿命 | 20,000 km | 条件により0.3倍から1倍 | 6,000から20,000 km |
これらのディレーティング係数は、一般的な産業用途に対する保守的な推定値である。具体的な数値は使用条件によって異なるが、このアプローチにより、システム統合時の不測の事態を防止できる。
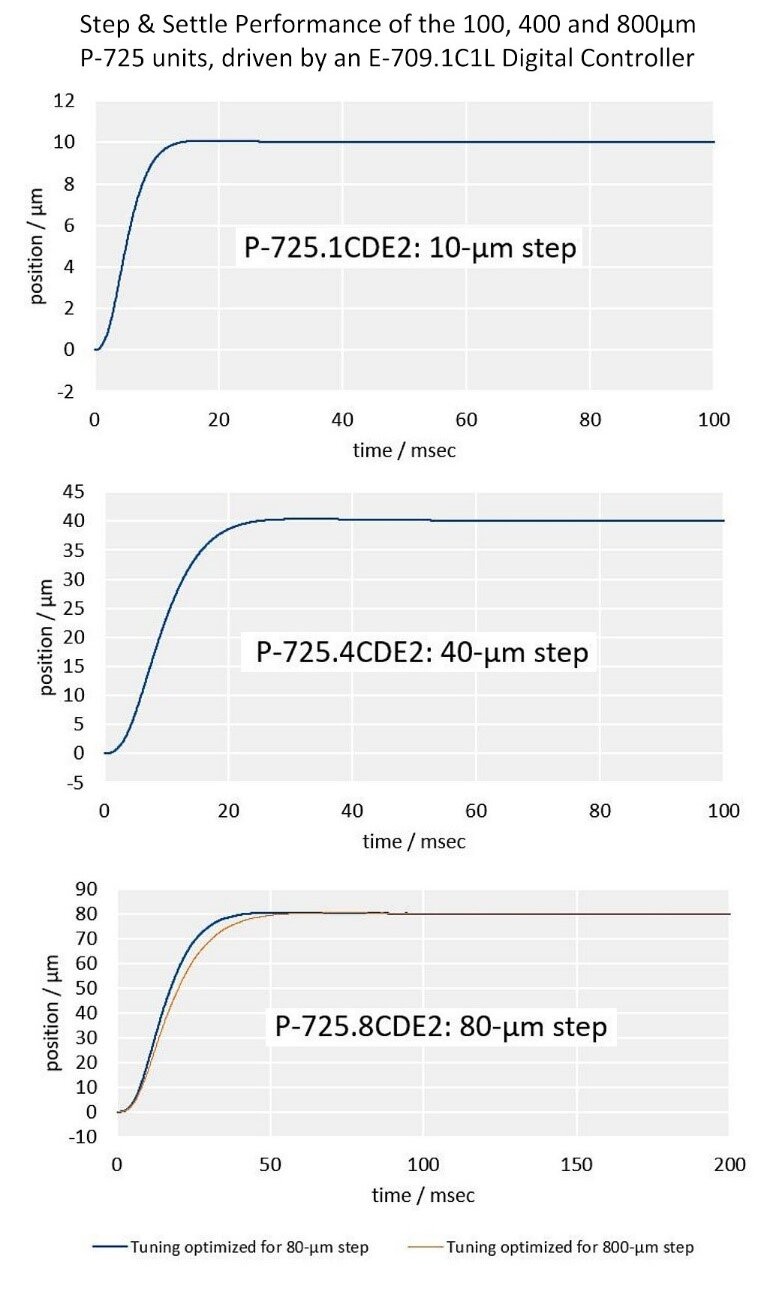
Image: PI P-725圧電フォーカスモーターのデジタルサーボコントローラ駆動による3つのステップサイズ(10、40、80 um)でのステップ・アンド・セトル性能。ほとんどの短距離移動アプリケーションでは、最大速度ではなく整定時間が支配的な仕様となる。Source: Physik Instrumente (PI)
異なるメーカー間でのモーター比較
競合するモーターを評価する際は、仕様を正規化する必要がある。
- 同一動作点で比較する。 ストール力10 N、無負荷速度500 mm/sのモーターが、ストール力8 N、速度300 mm/sのモーターより必ずしも優れているとは限らない。後者が連続的にその仕様を維持できるのに対し、前者が短時間バーストでしか達成できない場合には、後者の方が優れている可能性がある。
- 力-速度積で比較する。 最大力と最大速度の積(力 × 速度 = 出力)は、モーターの総機械出力能力の大まかな指標となる。
- 力密度で比較する。 単位体積あたりまたは単位質量あたりの力は、モーターサイズを正規化する。10 mm立方に収まる5 Nのモーターは、50 mm立方を必要とする10 Nのモーターより印象的である。
- 自分の実際の動作点を特定した上で比較する。 各メーカーの力-速度曲線上に、必要な力と速度をプロットする。自分の動作点で最も大きな余裕を提供するモーターが、見出しの仕様に関係なく、より良い選択である。
- 仕様の整合性を検証する。 メーカーAが同じモーターサイズとPZT体積でメーカーBの2倍の力を主張する場合、その根拠を問うべきである。物理法則には限界があり、劇的に優れた仕様は通常、モーター設計のブレークスルーではなく、異なる試験条件を示している。
主要仕様カテゴリ
| パラメータ | 代表的な範囲 | 留意点 |
|---|---|---|
| 分解能(nm) | 0.5 to 50 | エンコーダーに依存 |
| 繰り返し精度(um) | ±0.1 to 1 | 双方向 |
| 速度(mm/s) | 10 to 800 | 負荷に依存 |
| 推力(N) | 0.5 to 20 | デューティサイクルに制限 |
| ストローク(mm) | 5 to 200 | ステージ設計に依存 |
まとめ
圧電モーターのデータシートは出発点であり、保証ではない。仕様は実際のものだが条件付きであり、測定された条件はほとんどの場合、あなたの条件とは異なる。データシートを批判的に読み、各仕様の背後にある物理を理解し、メーカーに適切な質問をする習慣を身につけることで、システム統合時のトラブルや設計やり直しを削減できる。メーカーのアプリケーションエンジニアは最良のリソースである。早い段階で頻繁に活用すべきである。30分の電話で共有される情報は、データシート自体よりも価値があることが多い。