基礎原理
ピエゾモーターの駆動エレクトロニクス:電圧、電流、コントローラー統合
AC励振、電圧レベル、力率、サードパーティコントローラー統合、バッテリー駆動
超音波ピエゾモーターは単純なDCデバイスではない。ステーターの機械共振に正確に同調させた高周波AC駆動信号が必要であり、モーター設計に応じてピーク電圧は10 Vから200 Vに及ぶ。駆動エレクトロニクスはモーターそのものと同等にシステム性能を左右する。駆動回路の設計が不適切だと、モーター力が半減し、消費電力が3倍になり、過電圧によってPZTが破壊される可能性がある。仕様の読み方の記事では、データシートの数値が実際のドライバー要件とどのように関連するかを解説している。本稿では、超音波ピエゾモーターの電気的要件と、モーションコントロールシステムへの統合における実用的な考慮事項を取り上げる。

Image: Physik Instrumente (PI)
超音波ピエゾモーターの電気的等価モデル
駆動回路を論じる前に、ピエゾモーターに接続した際に駆動エレクトロニクスが「見る」ものを理解することが不可欠である。共振付近におけるピエゾモーターの電気的挙動は、Butterworth-Van Dyke(BVD)等価回路で記述される。
- C₀(静電容量): PZT素子は共振から離れた周波数ではコンデンサとして振る舞う。典型的な値は素子のサイズと個数に応じて1 nFから100 nFの範囲である。この静電容量はACサイクルごとに充放電される必要があり、無効電流を引き込む。
- L₁、C₁、R₁(モーショナルブランチ): 機械共振を表す直列RLC回路。L₁とC₁が共振周波数を決定し、R₁は機械損失(内部摩擦、負荷への放射、誘電損失)を表す。
- 共振時、モーショナルブランチのインピーダンスはR₁(通常5〜500 Ω)まで低下し、モーターは大きな有効電力を消費する。共振から離れると、インピーダンスはC₀に支配され、電流はほぼ全てが無効電流となる。
実用上の帰結として、ピエゾモーターは高度に無効性の負荷である。共振時の力率は通常0.1〜0.5であり、駆動回路はモーターが実際に消費する有効電力(W)の2〜10倍の皮相電力(VA)を供給する必要がある。これがドライバー設計を大きく左右する。
AC駆動要件
周波数
超音波ピエゾモーターは20 kHzから200 kHzの共振周波数で動作する。一般的な範囲は以下の通りである。
- 20〜40 kHz: 大型モーター(ステーター長 > 30 mm)、高推力用途。この周波数は人間の可聴域のすぐ上にあり、これは意図的なものである。かつての「ソニック」ピエゾモーターは5〜15 kHzで動作し、可聴域のノイズを発生していた。
- 40〜80 kHz: 中型モーター(10〜30 mmステーター)、精密位置決めステージで最も一般的な範囲。
- 80〜200 kHz: 小型モーター(10 mm未満のステーター)、カメラ、医療機器、MEMS近傍の用途に使用。
駆動回路はモーターの共振周波数で正弦波または準正弦波信号を生成する必要がある。温度ドリフトを補正するため、周波数は調整可能(または自動追尾可能)でなければならない。
波形品質
理想的な駆動信号は共振周波数の純正弦波である。実際には、多くの駆動回路がHブリッジまたはハーフブリッジトポロジーから矩形波を生成し、奇数次高調波(3f、5f、7f、...)を含む。モーターの高いQにより機械的にこれらの高調波はフィルタリングされ、ステーターは主に基本波成分に応答する。しかし、高調波はPZTの誘電加熱を増大させ、高次共振と一致する場合は望まない振動モードを励起する可能性がある。
最高効率と最低PZT発熱のためには、正弦波駆動が好ましい。これにはリニアアンプ(クラスABまたは出力フィルター付きクラスD)あるいはLCフィルター付きスイッチングトポロジーが必要である。コスト重視の用途では、Hブリッジからのフィルターなし矩形波が許容されるが、PZT発熱が20〜30%増加するペナルティを伴う。
二相駆動と単相駆動
駆動方式はモーターの種類に依存する。
- 定在波モーター(単一の振動モード、通常リニアスティックスリップまたはインチワーム方式に使用):単相駆動。1つのAC信号が1つの振動モードを励起する。
- 進行波モーター(2つの直交する振動モードが合成されて楕円運動を生成):二相駆動。同じ周波数の2つのAC信号を90°の位相差で印加し、2つのモードを励起する。位相関係が運動方向を決定し、位相を反転(+90°から-90°)するとモーターが逆転する。
- マルチモードモーター: 一部の設計では、2つの異なる共振周波数で2つのモードを励起する。ドライバーは2つの独立した周波数を生成する必要があり、複雑さが増す。
二相モーターでは、2つの駆動信号間の振幅バランスと位相精度がモーター性能に直接影響する。理想的な90°からの5°の位相誤差は、モーター力を約5%低下させる。位相間の10%の振幅不均衡は非対称な楕円運動を引き起こし、力と効率を低下させる。
電圧レベル
なぜ高電圧が必要か
圧電歪みは印加電界に比例する。
S = d × E = d × V/t
ここで、Sは歪み、dは圧電定数、Eは電界、Vは印加電圧、tはPZTの厚さである。
PZT-8(d₃₁ ≈ -97 pC/N)で素子厚さ0.5 mmの場合、実用的な振動振幅を得るには0.2〜1.0 kV/mmの電界が必要である。厚さ0.5 mmでは、これは100〜500 Vピークの駆動電圧に相当する。マルチレイヤー設計では層あたりの厚さが薄くなり(例えば50 µm)、必要電圧はそれに比例して低下する。
実用上、メーカーは定格駆動電圧を直接指定している。一般的な値は以下の通りである。
| モーターサイズ/種類 | 典型的な駆動電圧(Vピーク) |
|---|---|
| 超小型(カメラAF、5 mm未満) | 10〜30 |
| 小型(精密ステージ、5〜15 mm) | 30〜80 |
| 中型(産業用ステージ、15〜30 mm) | 80〜150 |
| 大型(高推力、30 mm超) | 100〜200 |
一部のモーターは、標準的な電源やコントローラーとの統合を簡素化するため、低電圧動作(12 Vまたは24 V)向けに設計されている。これらはマルチレイヤーPZTスタックを使用し、個々の層を薄く(50〜100 µm)することで、低い電圧で必要な電界を達成する。トレードオフとして静電容量が増加し(層数×面積/層厚に比例)、より大きな駆動電流が必要となる。
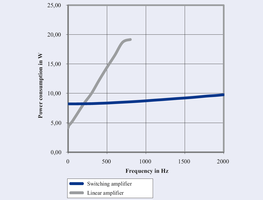
Image: Physik Instrumente (PI)
標準電源電圧レベル
システム設計者は通常以下の電源レールを使用する。
- 12 V DC: コンシューマーエレクトロニクス、ロボティクス、バッテリー駆動システムで一般的。超小型および一部の小型ピエゾモーターには十分。ドライバーが必要なAC電圧に昇圧または変換する。
- 24 V DC: 産業オートメーションの標準電源。適切なドライバー設計により、多くの精密ステージモーターに対応可能。
- 48 V DC: 高出力産業システム、通信、一部の車載用途に使用。最小限の電圧変換で中型モーターの直接駆動が可能。
- 120/230 V AC商用電源: 大出力ピエゾモーターシステムは整流商用電源から直接駆動電圧を得ることが可能だが、研究室用機器以外では一般的ではない。
ドライバーはDC電源を必要な電圧での高周波AC駆動信号に変換する必要がある。この変換段がドライバーの複雑さ、サイズ、効率の大部分を決定する。
電流消費
無効電流の支配
ピエゾモーターが引き込む電流は主に無効電流(C₀の充放電)である。周波数f、電圧V、静電容量C₀における無効電流は次式で表される。
I_reactive = 2π × f × C₀ × V
C₀ = 10 nFのモーターを40 kHz、100 Vピークで駆動する場合:
I_reactive = 2π × 40,000 × 10 × 10⁻⁹ × 100 = 0.25 A ピーク
機械的仕事をし損失を占める実(有効)電流は、通常、無効電流の10〜50%である。総電流は無効成分と有効成分のベクトル和となる。
各動作点での電流
| 動作条件 | 電流(相対値) | 備考 |
|---|---|---|
| 無負荷、非接触 | 低 | 無効電流と誘電損失のみ |
| 空転(外部負荷なし) | 中程度 | 無効電流+摩擦インターフェース損失 |
| 負荷時(抵抗に対して推進) | 高 | 無効電流+機械的仕事+摩擦損失 |
| ストール(拘束力) | 最大 | 無効電流+最大摩擦損失、機械出力ゼロ |
ストール時、モーターは最大電流を引き込みながら機械出力はゼロとなる。すべての入力電力がPZTと摩擦インターフェースで熱として散逸する。駆動回路はストール電流に連続的に耐えるか、モーターを保護するための電流制限を備える必要がある。
一般的な電流消費
- 超小型モーター(カメラAF):50〜200 mAピーク、10〜50 mA RMS
- 小型精密ステージモーター:100〜500 mAピーク、30〜200 mA RMS
- 中型産業用モーター:200 mA〜1 Aピーク、100〜500 mA RMS
- 大型高推力モーター:0.5〜2 Aピーク、200 mA〜1 A RMS
力率と効率
力率
ピエゾモーターの力率(PF)は次式で定義される。
PF = P_real / (V_rms × I_rms)
ここで、P_realは実際に消費される電力(機械出力+損失)である。C₀からの大きな無効電流のため、力率は通常以下の範囲となる。
- 軽負荷時:0.05〜0.15
- 定格負荷時:0.2〜0.5
- 最大効率点付近:0.3〜0.6
低い力率は、駆動アンプがモーターの実際の消費電力よりもはるかに大きなVA定格を持つ必要があることを意味する。力率0.1で1 Wの有効電力を消費するモーターには、10 VA定格のドライバーが必要である。
力率改善
一部の高度なドライバー設計は力率改善を組み込んでおり、通常はモーターと直列または並列にインダクタを追加してC₀からの無効電流を部分的に相殺する。2πfL = 1/(2πfC₀)となるよう同調された直列インダクタLは、動作周波数で無効成分を打ち消す直列共振を生成する。これにより力率を0.7〜0.9に改善し、ドライバーの電流定格を大幅に低減できる。
実用上の制約として、インダクタは動作周波数に同調させる必要があるが、温度とともにシフトする。室温の共振に最適化された固定インダクタは、モーターが温度上昇すると不整合が増大する。適応型マッチングネットワーク(スイッチドキャパシタバンクや可変インダクタを使用)でこれを解決できるが、複雑さが増す。
総合システム効率
ピエゾモーターシステムの総合的な電気-機械変換効率には以下が含まれる。
- DC-AC変換効率(ドライバー):トポロジーに応じて70〜95%。
- 電気機械結合効率(PZT):結合係数k²と誘電損失により30〜60%に制限。
- 摩擦インターフェース効率:ステーター振動エネルギーのうち有用な運動に変換される割合で50〜80%。摩擦熱との比率を表す。
総合システム効率は通常10〜30%であり、小型電磁モーターと同等だが、はるかに低速かつ単位体積あたりより高い力で達成される。効率は中程度の負荷(ストール力の40〜70%)で最も高く、軽負荷およびストール付近で低下する。
ドライバートポロジー

Image: PI E-609 OEMピエゾコントローラーモジュール。アンプ、サーボコントローラー、デジタルインターフェースをコンパクトなPCBに統合。Source: PI
ハーフブリッジ
最もシンプルなスイッチングトポロジーで、2つのトランジスタ(MOSFETまたはGaN FET)がモーターの一方の端子を電源電圧とグランドに交互に接続する。モーターの共振周波数で矩形波を生成する。利点:シンプル、部品点数が少ない、コンパクト。欠点:電圧が電源レールに制限される、矩形波駆動はPZT発熱を増大させる。
48 V電源の場合、ハーフブリッジは48 Vピークツーピーク(24 Vピーク)の矩形波を生成する。低電圧要件の小型〜中型モーターに適している。
フルHブリッジ
4つのトランジスタをフルブリッジ構成とし、モーターを差動駆動する。電源電圧の2倍に等しいピークツーピーク電圧の双極矩形波を生成する。48 V電源では96 Vピークツーピーク(48 Vピーク)の矩形波となる。ハーフブリッジと比較して利用可能電圧が2倍になる。
二相モーターでは、2つのHブリッジ(各位相に1つ)が使用され、制御ロジックが90°位相関係を管理する。
LCフィルター付きクラスDアンプ
スイッチングアンプ(ハーフブリッジまたはHブリッジ)の後にLC低域通過フィルターを配置し、高調波を除去して正弦波に近い出力を生成する。フィルター設計:LCのカットオフ周波数を基本波と3次高調波の間に設定する(例:40 kHzモーターでは60〜80 kHzでカットオフ)。このトポロジーは85〜95%のドライバー効率とクリーンな正弦波出力を実現する。
フィルター部品(インダクタとコンデンサ)は高周波でのフルモーター電流に対応する必要があり、コア材(フェライトまたは鉄粉)とコンデンサ種類(フィルムコンデンサ、電解コンデンサは不可)の慎重な選定が求められる。
リニアアンプ(クラスAB)
リニアアンプは優れた忠実度とスイッチングノイズのない真の正弦波を生成する。効率は低く(30〜50%)、アンプは電源電力と出力電力の差を熱として散逸させる必要がある。EMIと信号純度が最重要となる研究室環境や一部の精密機器で使用される。バッテリー駆動や高出力用途には実用的ではない。
トランス結合方式
ドライバー段とモーターの間にステップアップトランスを配置することで、低電圧ドライバーで高電圧モーター駆動信号を生成できる。24 V電源と1:5のトランスで、モーターに120 Vピークを供給できる。利点:標準的な低電圧コンポーネントを使用可能、ガルバニック絶縁を提供。欠点:20〜200 kHzでのトランスのサイズと重量、コア損失、漏れインダクタンスによる波形品質への影響。
圧電トランス(PT)は代替手段である。磁気結合ではなく機械共振を通じて電圧をステップアップするピエゾ素子である。PTはコンパクトで高効率(90〜95%)だが、電力容量に制限があり(通常5 W未満)、モーターの周波数に整合させる必要がある。
サードパーティコントローラーとの統合

Image: SmarAct MCS2コントローラー。マルチチャネルピエゾモータードライバー、閉ループ位置決め、デジタルディスプレイ、手動ジョイスティック制御を統合。Source: SmarAct
インターフェースの課題
産業オートメーションにおけるほとんどのモーションコントローラーは電磁モーター用に設計されている。ステッピングドライバーはステップ/ディレクションパルスを出力し、サーボドライブはブラシレスDCまたはACモーター用のHブリッジにPWMを出力する。ピエゾモーターは本質的に異なる駆動信号(特定の電圧、周波数、位相の高周波AC)を必要とし、統合上のギャップが生じる。
統合アーキテクチャ
アナログ入力付き専用ピエゾドライバー。 最もシンプルな統合方法で、スタンドアロンのピエゾドライバーがアナログ速度コマンド(0〜10 Vまたは±10 V)を受信し、適切な高周波駆動信号を生成する。システムのモーションコントローラーはボイスコイルやDCモーターと同様にアナログコマンドを出力する。ピエゾドライバーが共振追尾と二相生成をすべて内部で処理する。
このアーキテクチャはうまく機能するが、別体のボックス(ピエゾドライバー)がシステムに追加され、コスト、スペース、配線の負担が生じる。
デジタルインターフェース付き専用ピエゾドライバー。 上記と同様だが、コマンドインターフェースがデジタルである:RS-232、SPI、EtherCAT、または独自プロトコル。システムコントローラーが速度を設定し、位置を読み取り(ドライバーがエンコーダー処理を含む場合)、モーターのステータスを監視できる。より高機能だが、ソフトウェア統合が必要。
モーションコントローラーカード上のピエゾドライバー統合。 一部のモーションコントローラーメーカーは、ピエゾ駆動信号を直接生成するプラグインモジュールを提供している。コントローラーの軌道生成器がピエゾモジュールにフィードし、モジュールが共振追尾とパワーアンプを処理する。最も密な統合を実現するが、特定のコントローラープラットフォームに制限される。
FPGAベースのカスタムドライバー。 量産によりエンジニアリングコストが正当化されるOEM用途では、FPGA上に実装されたカスタムドライバーが完全な柔軟性で駆動信号を生成できる。FPGAには周波数生成用のDDS(ダイレクトデジタルシンセシス)、共振追尾用のPLL、パワーステージ用のPWMが実装される。モーションコントローラーとはSPI、パラレルI/O、またはフィールドバスを介して通信する。
閉ループ位置制御
ピエゾモーターは本質的にオープンループデバイスであり、駆動信号と速度の関係は非線形で負荷依存性がある。精密位置決めには、外部位置センサー(エンコーダー、干渉計、静電容量式センサー)を用いた閉ループ制御が必須である。
制御ループの構造は以下の通りである。
- 位置コントローラー(PIDまたはより高度な方式):目標位置と実位置を比較し、速度コマンドを出力する。
- 速度コントローラー(スキャニング用途ではオプション):目標速度と実速度を比較し、駆動振幅コマンドを出力する。
- ピエゾドライバー:振幅コマンドを追尾共振周波数の高周波駆動信号に変換する。
- モーター:駆動信号を運動に変換する。
- 位置センサー:実位置を計測し、位置コントローラーにフィードバックする。
制御帯域幅は、モーターの機械応答時間(超音波モーターでは通常0.5〜5 ms)とセンサーの更新レートによって制限される。ピエゾ位置決めステージのサーボ帯域幅は通常100〜500 Hzであり、大半の位置決めおよびスキャニング用途に十分である。
ステップ/ディレクションインターフェースエミュレーション
一部のピエゾドライバーメーカーは、ピエゾモーターをコントローラーからステッピングモーターに見せるステップ/ディレクションインターフェースを提供している。各ステップパルスが固定変位量(例:100 nm/ステップ)の動作を指令する。ドライバーは内部で適切なAC駆動信号を生成し、エンコーダーフィードバックを使用して指令されたステップサイズを実現する。これは既存のステッピングモーターインフラとの統合を簡素化するが、コントローラーのパルス出力周波数によってステップレートが制限されると、モーターの最大速度を達成できない場合がある。
バッテリー駆動
ピエゾモーターがバッテリー駆動に適する理由
ピエゾモーターにはバッテリー駆動用途に有利な特性がいくつかある。
- 保持電流ゼロ。 セルフロック特性により、位置保持中に電力を消費しない。これは位置維持に連続電流を必要とする(またはブレーキ機構を要する)電磁モーターに対する決定的な利点である。
- 低い平均消費電力。 間欠動作用途では、動作中のピーク電力が数ワットであっても、平均消費電力を100 mW未満に抑えることができる。
- コンパクトな駆動エレクトロニクス。 ドライバーをデバイス筐体内に収まるサイズまで小型化できる。
電圧変換の課題
バッテリー電圧(単セルLi-ionで3.7 V、マルチセルパックで7.4〜14.8 V、電動工具や車載バッテリーで24〜48 V)は、モーターの必要駆動電圧よりも低いことが多い。昇圧コンバーターまたはチャージポンプで電圧をステップアップする必要があり、効率損失(5〜15%)とEMI発生を伴う。
低電圧モーター(マルチレイヤーPZT、12〜30 V駆動)では、単セルまたはデュアルセルLi-ionパックからシンプルな昇圧コンバーター(効率90%超)でモーターを駆動できる。高電圧モーター(100 V以上駆動)では、電圧変換比が大きくなり(10〜30倍)、コンバーター効率は75〜85%に低下し、部品ストレスが増大する。
電力バジェットの例
バッテリー駆動レンズ位置決めシステムの場合:
- モーター:超小型定在波、20 Vピーク駆動、負荷時50 mA RMS
- モーションプロファイル:100 msで5 mm走行、その後10秒間保持
- 動作電力:20 V × 50 mA × 0.3(力率) = 0.3 W(動作中)
- 平均電力:0.3 W × (0.1 / 10.1) = 3 mW
- ドライバー待機電力:5 mW(マイコン、PLL、スタンバイ回路)
- 総平均電力:8 mW
- バッテリー:18650 Li-ion 1本、3.7 V、3000 mAh = 11.1 Wh
- 理論的な連続使用時間(平均8 mW時):11,100 / 8 = 1388時間 = 約58日
実際には、昇圧コンバーターの損失やその他のシステム負荷により連続使用時間は短くなるが、核心的なポイントは変わらない。ピエゾモーターは間欠的な位置決めにおいて極めてバッテリーフレンドリーである。
EMIに関する考慮事項
EMIの発生源
超音波ピエゾモーターシステムは複数の発生源から電磁干渉(EMI)を発生させる。
-
ドライバーのスイッチングトランジェント。 HブリッジおよびハーフブリッジトポロジーはGaN FETで1〜10 V/ns、シリコンMOSFETで0.1〜1 V/nsの高速電圧遷移(dV/dt)を生成する。これらの遷移は寄生容量を通じて周辺回路に結合し、配線やPCBトレースから放射される。
-
高周波モーター電流。 20〜200 kHzのモーター電流がドライバーとモーター間のケーブルを流れる。適切にシールドまたはツイストされていないケーブルは、駆動周波数とその高調波でループアンテナとして機能する。
-
高調波成分。 矩形波駆動は3f、5f、7fなどの高調波を生成する。40 kHzモーターでは、120 kHzの3次高調波と200 kHzの5次高調波が、放射EMI規制の厳しい周波数帯に入る。
EMI対策
ケーブルシールド。 ドライバーとモーター間にシールドツイストペアまたは同軸ケーブルを使用する。グランドループを避けるため、シールドはドライバー側で接地する(一点接地)。
出力フィルタリング。 ドライバー出力にLCフィルターを配置し、モーターケーブルに到達する前に高調波成分を低減する。これにより、高調波によるPZT誘電加熱も軽減され、モーター効率も向上する。
スルーレート制御。 ドライバートランジスタのスイッチング速度を低下させる(ゲート抵抗の追加またはより低速なデバイスの使用)ことで、わずかなスイッチング損失の増加と引き換えに高周波EMIを低減する。0.5 V/nsのdV/dtが許容可能な妥協点となることが多い。
PCBレイアウト。 大電流駆動ループ(ドライバー出力からモーターへの往復)をできるだけ小さく保つ。デカップリングコンデンサをドライバーICの近くに配置する。グランドプレーンを使用して低インピーダンスのリターンパスを確保する。
スペクトラム拡散変調。 一部の高度なドライバーは、共振周波数の周囲±1〜5%でスイッチング周波数を変調し、EMIエネルギーをより広い帯域に分散させてピーク放射を低減する。この手法はスイッチモード電源設計から借用したものであり、伝導エミッション限度の達成に効果的である。
規制適合
ピエゾモーターシステムはEMC規制(米国のFCC Part 15、EU EMC指令に基づくCEマーキング、日本のVCCI)に準拠する必要がある。20〜200 kHzの動作周波数は伝導エミッション範囲(EN 55032の150 kHz〜30 MHz)に入り、高調波は放射エミッション範囲(30 MHz〜1 GHz)に達する。
実用上、適切に設計されたピエゾモータードライバーは、シールドケーブル、出力フィルタリング、適切なPCBレイアウトといった基本的な対策でクラスB(住宅用)エミッション限度を満たす。クラスA(産業用)への適合は通常容易である。主な課題は、DC電源入力における伝導エミッションであり、スイッチングコンバーターの入力電流リップルをフィルタリングする必要がある。
ドライバー設計の実用チェックリスト
ピエゾモータードライバーを設計または選定するエンジニア向けに、確認すべき主要仕様を以下に示す。
-
出力電圧範囲。 PLL追尾変動に対して20%のマージンを含め、モーターの定格電圧をカバーすること。モーターが100 Vピーク定格であれば、ドライバーは少なくとも120 Vピークを出力できるべきである。
-
出力電流容量。 最悪条件の静電容量と電圧における無効電流を供給できること。I = 2πfC₀Vを計算し、負荷電流に対して50%のマージンを加える。
-
周波数範囲。 温度ドリフトに対するマージンを含めてモーターの共振周波数をカバーすること(最低±3%、望ましくは±5%)。
-
周波数分解能。 高Q(> 500)のモーターでは、周波数ステップサイズが3 dB帯域幅内に収まるのに十分小さくなければならない。Q = 1000の40 kHzモーターの帯域幅は40 Hzであり、周波数分解能は5 Hz以下が望ましい。
-
位相精度(二相モーター)。 駆動チャネル間の位相誤差は、高性能用途では2°未満、標準用途では5°未満であるべきである。
-
共振追尾方式。 PLL、インピーダンス追尾、またはデジタルスキャニング。PLLが最も一般的である。ロック範囲と追尾速度がアプリケーションの温度および負荷過渡要件に合致することを確認する。
-
保護機能。 過電流保護(モーターストール時の耐性)、過電圧保護、温度シャットダウン。オプション:モーター温度上昇時の自動駆動低減。
-
コマンドインターフェース。 システムコントローラーの要件に応じて、アナログ(0〜10 V、±10 V)、デジタル(SPI、I²C、UART)、またはフィールドバス(EtherCAT、CANopen)。
-
EMC適合性。 伝導および放射エミッションが目標の規制基準を満たすこと。ドライバーメーカーにEMC試験レポートを要求する。
-
効率。 ピーク出力時だけでなく、アプリケーションの典型的な動作点での効率を確認すること。フルロードで90%効率だが10%負荷で50%効率のドライバーは、スリープモードがなければ低デューティサイクルの用途で過熱する。
よくある失敗
ピエゾモーターにDC信号を印加する。 PZT素子にDCを印加しても、超音波モーターでは有用な運動は生じない。静的変位が生じるが、これは準静的ピエゾアクチュエーター(スタック型またはベンダー型)で使用されるものであり、超音波モーターとは無関係である。さらに悪いことに、持続的なDCはPZT電極の電気化学的マイグレーションを引き起こし、短絡故障につながる可能性がある。
オーディオアンプの使用。 オーディオアンプは20 Hz〜20 kHzで4〜8 Ωの負荷に対して動作する。ピエゾモーターは20〜200 kHzで、アンプの安定性限界を超える高度に無効性の負荷で動作する。一部のオーディオアンプは20〜40 kHzのモーターでプロトタイプ作業に使用できるが、効率が悪く(容量性負荷の駆動)、過熱する可能性があり、共振追尾機能もない。
ケーブル容量の無視。 ドライバーとモーター間の長いケーブルは寄生容量を付加する(同軸ケーブルで通常50〜100 pF/m)。この容量はC₀と並列に見え、無効電流を増加させ、電気共振をシフトさせる。1 mを超えるケーブル長では、追加容量をドライバーの電流バジェットとPLL同調に含めるべきである。
固定周波数駆動。 熱的挙動の記事で述べたように、固定周波数駆動はモーター温度が厳密に制御されている場合(±5 °C)にのみ成り立つ。それ以外のすべての場合、周波数追尾は必須である。
過駆動。 定格以上の駆動電圧はモーター力と速度を増加させ、エンジニアが限界を押し上げる誘惑にかられる。しかし、過駆動はPZTの疲労を加速し、誘電加熱を増大させ、ステーターの機械的故障を引き起こす可能性がある。定格電圧はメーカーが評価した安全な長期動作点を表しており、明示的な承認なく10%以上超過すると、モーターの寿命保証が無効となる。
まとめ
超音波ピエゾモーターの駆動には、正確に追尾された共振周波数での高周波AC励振が必要であり、電圧レベルは10〜200 Vピーク、電流は無効電力が支配的である。ドライバートポロジー(Hブリッジ、クラスD、リニア、トランス結合)は、モーターの電圧・電流要件に適合しつつ、信号品質と効率を維持する必要がある。標準的なモーションコントローラーとの統合は、アナログまたはデジタルコマンドインターフェースを介して実現され、ピエゾドライバーが内部で共振追尾を処理する。バッテリー駆動はモーターの保持電力ゼロ特性により間欠位置決めに実用的であるが、電圧変換の効率が前提となる。EMI管理にはシールドケーブル、出力フィルタリング、適切なPCBレイアウトが必要である。ピエゾモーターシステムの設計を成功させるには、駆動エレクトロニクスをモーターと同等のパートナーとして扱い、同レベルの仕様策定、設計、検証を行うことが求められる。