基礎原理
圧電アクチュエータの熱特性:ステータ60 °Cシフト問題
共振周波数ドリフト、キュリー温度限界、信頼性の高い動作のための熱管理
すべての超音波ピエゾモータは共振デバイスです。特定の機械的共振周波数(通常20 kHzから200 kHz)で動作し、その周波数においてステータの振動振幅がピークに達し、モータが有用な力と速度を生み出します。この共振周波数は固定されたものではありません。温度とともに変動し、その変動量は駆動回路が追従できなければモータを動作帯域から逸脱させるのに十分です。これが「60 °Cステータシフト問題」と呼ばれるものです。周囲温度から約60 °C上昇すると、多くのPZTベースのステータでは共振周波数が1から3%シフトし、モータの力出力を半減させるか、完全に停止させるほどの影響があります。この挙動を理解し管理することは、狭い温度範囲を超えて動作するすべてのピエゾモータアプリケーションにおいて不可欠です。
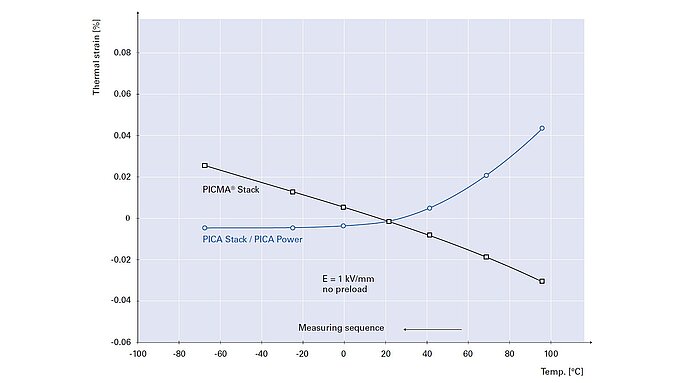
Image: Physik Instrumente (PI)
共振周波数が温度で変化する理由
振動するステータの共振周波数は、その形状、質量、弾性剛性に依存します。簡略化した梁型ステータでは、基本周波数は以下のようにスケールします。
f ∝ √(E / ρ) × (t / L²)
ここでEは有効ヤング率、ρは密度、tは厚さ、Lは長さです。温度はEとρの両方に影響を及ぼしますが(ρは熱膨張を通じて変化)、支配的な効果はPZTセラミックの弾性定数の変化です。
温度上昇に伴うPZTの軟化
PZT(チタン酸ジルコン酸鉛)は強誘電体材料です。弾性特性、誘電特性、圧電特性はすべて温度に依存し、その依存性は線形ではありません。室温からキュリー温度に向かって温度が上昇すると、以下の変化が生じます。
- 弾性コンプライアンス(s₁₁、s₃₃)が増加し、材料が軟化する。
- 圧電定数(d₃₁、d₃₃)が増加し、印加電圧に対する応答性が高まる。
- 誘電率(ε₃₃)が増加し、所定の電圧と周波数でより多くの電流を引き込む。
- 機械的品質係数(Qm)が低下し、損失が増大して共振ピークが広がる。
共振周波数に対する正味の効果は下方シフトです。一般的な「ハード」PZT組成(PZT-4、PZT-8、およびそれらの市販品)では、共振周波数は1 °Cあたり約0.02から0.05%低下します。この値は小さく見えますが、蓄積すると無視できなくなります。
| 温度上昇 (°C) | 周波数シフト (%) | 40 kHzステータでのシフト (Hz) |
|---|---|---|
| 10 | 0.2から0.5 | 80から200 |
| 30 | 0.6から1.5 | 240から600 |
| 60 | 1.2から3.0 | 480から1200 |
| 100 | 2.0から5.0 | 800から2000 |
機械的Q値が500の40 kHzモータでは、3 dB帯域幅はわずか80 Hzです。500 Hzの周波数シフトは動作点を共振ピークから完全に外し、振動振幅を1桁低下させます。モータは実質的に動作不能となります。
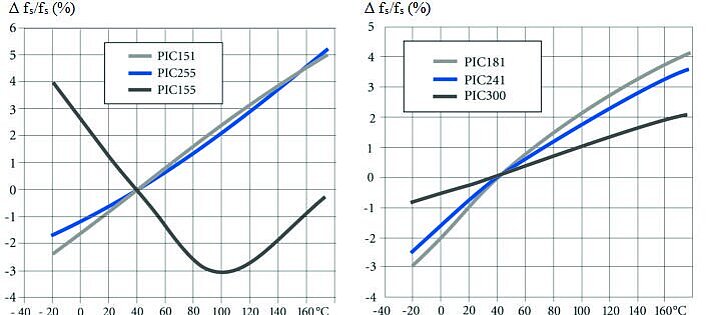
Image: PI PICシリーズのハードおよびソフトPZTセラミックにおける共振周波数シフト(Δfs/fs)の温度依存性。駆動回路が補償すべき非線形ドリフトを示す。Source: Physik Instrumente (PI)
金属ステータ本体からの寄与
PZTセラミックは金属ステータ本体(通常はステンレス鋼、リン青銅、チタン)に接合されます。金属のヤング率も温度とともに低下しますが、PZTより小さな割合です。ステンレス鋼の場合、1 °Cあたり約0.02から0.04%です。ステータは複合構造体であるため、全体的な周波数シフトはPZTと金属の寄与の加重平均になります。実際にはPZTの温度係数が金属の2から5倍大きいため、PZTが支配的です。
ステータ本体の熱膨張は寸法を変化させ、共振周波数にも影響します。線膨張係数が16 × 10⁻⁶ /°Cのステンレス鋼では、60 °Cの温度上昇で長さが約0.1%変化します。これは約0.05%の周波数シフトに寄与し、PZT剛性変化と比較すると小さいですが、無視できるものではありません。
過渡熱解析:時定数と熱モデリング
ピエゾモータの過渡的な熱応答を理解することは、駆動開始後にステータがどれだけ早く加熱されるか、また駆動停止後にどれだけの時間で冷却されるかを予測するために不可欠です。熱的挙動は、熱時定数τ = R_th × C_thで支配される指数関数モデルに従います。ここでR_thはPZTからヒートシンクまでの熱抵抗(°C/W)、C_thはステータアセンブリの熱容量(J/°C)です。
集中パラメータ熱モデル
典型的な小型ピエゾモータステータ(質量5から15 g)の熱システムは、取り付けベースに熱抵抗を介して接続された単一の集中質量としてモデル化できます。主要パラメータは以下の通りです。
- ステータの熱容量:C_th = m × c_p。質量10 gのステンレス鋼ステータの場合、C_th = 0.010 kg × 500 J/(kg·°C) = 5 J/°C。
- ステータからマウントまでの熱抵抗:接触面積、界面材料、取り付け方法に依存します。ボルト締結の場合、5から50 °C/Wが典型的です(サーマルグリース使用で低い値、点接触やセラミックスペーサーでは高い値)。
- 熱時定数:C_th = 5 J/°C、R_th = 20 °C/Wの場合、τ = 100秒。
ステータの温度上昇はT(t) = P × R_th × (1 - e^(-t/τ))に従います。P = 0.5 Wおよび上記の値の場合、定常状態の温度上昇は10 °Cであり、95%に到達するまでに約5τ = 500秒(約8分)を要します。
精密用途向けの多ノードモデル
単一ノードモデルはステータのピーク温度を推定するには十分ですが、ステータ内の温度勾配を予測するには不十分です。温度勾配は不均一な膨張を引き起こし、振動モード形状を歪ませてモータ効率を低下させるため、重要です。
2ノードモデルではPZTセラミックと金属ステータ本体を分離します。PZT(誘電損失の大部分が発生する箇所)が先に加熱され、接着剤の接合層を通じて金属本体に熱が伝導します。接着層は通常、厚さ10から50 µm、熱伝導率0.2から1 W/(m·K)のエポキシであり、熱的ボトルネックとなります。接合面積10 × 10 mm、厚さ20 µm、k = 0.5 W/(m·K)の場合、接合層の熱抵抗は以下です。
R_bond = thickness / (k × area) = 0.00002 / (0.5 × 0.0001) = 0.4 °C/W
これはステータからマウントへの熱抵抗と比較すると小さいですが、PZT体積が大きく高デューティサイクルのステータでは、PZTコアとステータ表面間に5から15 °Cの内部温度勾配が発生する可能性があり、無視できません。
有限要素熱シミュレーション
重要なアプリケーションでは、有限要素解析(FEA)が最も正確な熱予測を提供します。シミュレーションには以下が必要です。
- PZT内の体積発熱(誘電損失から計算:P = 2π × f × ε₃₃ × tan δ × E² × volume。ここでfは周波数、Eは電界、tan δは損失正接)。
- 接触チップでの摩擦発熱(摩擦力 × 滑り速度から計算)。
- 境界条件:マウントへの伝導(接触抵抗を含む)、周囲への放射(真空中では重要)、大気中の場合は対流。
- 温度依存の材料物性(PZTの損失正接は温度とともに増加し、適切に管理しなければ熱暴走を引き起こす正のフィードバックループを形成する)。
FEAアプローチは、熱的限界付近で動作するモータや、対流冷却のない真空中で熱がステータに集中して急峻な温度勾配が生じるモータにとって特に重要です。
キュリー温度の上限
すべての強誘電体材料にはキュリー温度(Tc)があり、この温度を超えると圧電特性が永久に失われます。セラミックは強誘電(正方晶または菱面体晶)相から常誘電(立方晶)相へ相転移し、自発分極が消失します。一般的なPZT組成のキュリー温度は以下の通りです。
| 材料 | キュリー温度 (°C) |
|---|---|
| PZT-4(ハード) | 328 |
| PZT-5A(ソフト) | 365 |
| PZT-8(ハード) | 300 |
| PZT-5H(ソフト) | 193 |
| ニオブ酸リチウム | 1150 |
| BaTiO₃ | 120 |
超音波モータでは、共振時に大きな振動振幅を実現する高い機械的品質係数を持つハードPZT組成(PZT-4、PZT-8)が好まれます。300から330 °Cのキュリー温度は、通常の動作温度に対して十分な余裕があります。
ただし、実用的な温度限界はTcよりもかなり低くなります。温度がTcに近づくと、圧電定数が不安定になり、ヒステリシスが増大し、エージングが加速します。実用的な目安として、通常動作では最大PZT温度をTcマイナス100 °C以下、絶対上限としてはTcマイナス50 °Cに制限すべきです。PZT-8(Tc = 300 °C)の場合、推奨される最大動作温度は約200 °Cです。PZT-5H(Tc = 193 °C)では限界が約100 °Cまで下がり、高デューティサイクル動作中に到達する温度に近くなります。
キュリー温度以下での脱分極
部分的な脱分極は、Tcを大幅に下回る温度でも発生し得ます。特に持続的な機械的応力や強いAC電界下では顕著です。超音波モータのPZTは、高いAC駆動(共振時に10から200 Vピーク)と予圧力による機械的応力を同時に受けるため、この点は懸念材料となります。熱、電気、機械の複合負荷がドメイン再配向を引き起こし、数千時間かけてセラミックを部分的に脱分極させる可能性があります。脱分極は瞬時に発生するものではなく、モータ性能の漸進的な低下として現れます。
実用上の意味として、短時間のテストでは80 °Cで問題なく動作するモータが、同じ温度で1000時間後には測定可能な性能劣化を示す可能性があります。これは累積的な部分脱分極によるものです。
Image: Physik Instrumente (PI)
熱膨張と位置決めへの影響
ステータの寸法変化
ステータの熱膨張は、摩擦チップとランナー間の接触形状に直接影響します。ステータが膨張すると予圧が変化し、力出力と摩擦界面の摩耗の両方に影響を及ぼします。取り付け点と摩擦チップの間が10 mmのステータでは、60 °Cの温度上昇により以下の変位が生じます。
- ステンレス鋼:10 mm × 16 × 10⁻⁶ /°C × 60 °C = 9.6 µm
- チタン:10 mm × 8.6 × 10⁻⁶ /°C × 60 °C = 5.2 µm
- Invar:10 mm × 1.2 × 10⁻⁶ /°C × 60 °C = 0.7 µm
予圧ギャップの10 µmの変化は、予圧スプリングのたわみ変化に直接変換されます。予圧スプリングのばね定数が5 N/mmの場合、これは0.05 Nの変化に相当し、公称予圧が0.5から2 Nの小型モータでは無視できない値です。
ステージレベルの熱ドリフト
位置決め精度は、モータ自体よりもステージ構造体の熱膨張によって制限されることが多いです。長さ200 mmのアルミニウムステージベースは、1 °Cあたり200 × 23 × 10⁻⁶ × 1 °C = 4.6 µm膨張します。ナノメートルレベルの位置決めでは、わずかな温度変化でも重大な影響をもたらします。
この問題はすべてのモータ技術に共通であり、ピエゾモータに固有のものではありません。ただし、ピエゾ特有の効果と2つの点で相互作用します。
- モータの自己発熱がステージの熱ドリフトに寄与します。熱的に絶縁されたステージ上で0.5 Wを消費するピエゾモータは、ステージ温度を数度上昇させる可能性があります。
- 自己発熱によるモータの共振周波数シフトに駆動回路が補償で応答し、駆動振幅や周波数を変化させると、モータの発熱量が変化してフィードバックループが形成されます。
60 °C問題の実際
「60 °Cステータシフト問題」とは、室温で設計・調整されたモータが、60 °C高い環境に配置された場合(または動作中に周囲温度から60 °C自己発熱した場合)のシナリオを指します。この温度上昇では、共振周波数シフト、Qmの低下、予圧変化が複合して、モータ性能が30から70%低下する可能性があります。
事例1:半導体ウェーハハンドリング
ウェーハ搬送アームを駆動するピエゾリニアモータが、プロセスモジュール内で80 °Cの雰囲気温度(室温にプロセス加熱を加えたもの)で動作しています。モータは25 °Cで特性評価され、50 mm/sで5 Nの力を達成していました。80 °C(ΔT = 55 °C)では以下の状況が発生しました。
- 共振周波数が1.8%低下(42.0 kHzから41.24 kHzへ)。
- 固定周波数発振器を使用した駆動回路は、42.0 kHzで駆動を継続していた。
- 振動振幅が室温時の35%に低下。
- モータの力が約1.8 Nに低下し、ウェーハの確実な搬送には不十分となった。
- 解決策:固定周波数ドライバーを、共振周波数を自動追従する位相ロックループ(PLL)に置き換えた。
この事例は、10から15 °Cを超える温度変動があるアプリケーションでは周波数追従が不可欠であることを示しています。
事例2:通信モジュールにおける光ファイバアライメント
6軸ピエゾ位置決めステージが、気密封止パッケージ内でシングルモードファイバとフォトニックチップのアライメントを行います。パッケージはリフローはんだ付け(260 °C、短時間)を経た後、通信筐体内で55 °Cの雰囲気温度で動作します。アライメント時(封止前)はステージが室温で動作し、90%以上の結合効率を達成します。パッケージ封止後および通電後、ファイバとチップのアライメントは0から70 °Cの動作温度範囲にわたって±100 nm以内に維持される必要があります。
ピエゾステージ自体は封止パッケージの外にありますが、ファイバを搭載した光学ベンチは温度とともに膨張します。ステージは温度センサの読み取り値に基づいて位置を調整して補償します。ここで重要なのは、モータ自身の熱ドリフト(共振周波数シフト、予圧変化)が、熱補償に割り当てられた±100 nmのエラーバジェットを消費してはならないということです。PLL追従駆動と熱的に分離されたマウントにより、全温度範囲にわたるモータの位置決め誤差への寄与は5 nm未満に抑えられ、光学ベンチの膨張補正に95 nmのバジェットが残されます。
このアプリケーションは、ピエゾモータの熱管理がより大きなシステムの熱補償をいかに可能にするかを示しています。モータ自体が50 nmの熱ドリフトを導入した場合、ベンチ補正に利用できるバジェットは50 nmに縮小し、2倍厳密な熱モデルまたは光学ベンチのアクティブ冷却が必要になります。
駆動回路:周波数追従戦略
位相ロックループ(PLL)
最も一般的なアプローチはPLLを使用して駆動周波数をモータの共振周波数にロックする方法です。PLLは駆動電圧とモータ電流間の位相関係を監視します。共振時、位相差は直列共振ではゼロ付近となり、並列共振では特定の値に達します。PLLは共振周波数がドリフトしてもこの位相関係を維持するよう駆動周波数を調整します。
PLL追従は、緩やかな温度変化(分から時間のオーダー)に対してよく機能します。数パーセントの周波数シフトを追従でき、熱ドリフトへの対応には十分です。主な制約は、急速な温度過渡現象時やQ値が低下して共振での位相遷移が緩やかになりすぎた場合に、PLLがロックを失う可能性があることです。
典型的なPLL追従帯域幅:100から1000 Hzの更新レートで、最大100 Hz/sの共振周波数変化に追従可能。
アドミタンス(インピーダンス)追従
代替アプローチとして、複数の周波数でモータの電気アドミタンスを測定し、共振ピークを直接特定する方法があります。低Q値の条件ではPLLより堅牢ですが、より複雑な励起方式(周波数掃引やマルチトーン励起)が必要です。PLLのロック喪失が許容されない高信頼性アプリケーションで使用されます。
デジタル周波数スキャン
最新のデジタル駆動回路は、予想される共振周辺の帯域を周期的に周波数掃引し、モータの応答(振動振幅、電流、速度)を測定して、最適点に駆動周波数を調整できます。この方式は堅牢で柔軟性が高いですが、掃引中にモータ動作が一時的に中断されます。間欠的な位置決め用途では許容されますが、連続走査用途には不向きです。
温度フィードフォワード
ステータ温度を測定(埋め込み熱電対またはサーミスタ、あるいは駆動電流からの推定)し、既知の温度係数から予想される周波数シフトをフィードフォワード補正として駆動周波数に適用する方法です。これによりPLLやインピーダンストラッカーへの負担が軽減され、過渡応答が改善されます。温度係数はPZT組成、ステータ形状、接合方法に依存するため、モータ設計ごとにキャリブレーションが必要です。
熱管理戦略
発熱の低減
超音波ピエゾモータの主な熱源は以下の通りです。
- PZTの誘電損失。 PZTは駆動電圧の2乗、周波数、損失正接(tan δ)に比例して電力を消費します。40 kHz、100 VピークのハードPZTでは、典型的な消費電力は0.1から1 Wです。
- 接触界面の摩擦。 ステータチップとランナー間の滑り接触が、法線力、滑り速度、摩擦係数に比例した摩擦熱を発生させます。アクティブ動作中の発熱は0.1から0.5 W程度です。
- 構造減衰。 接着層、ボルト締結部、その他の構造要素における内部摩擦がわずかに寄与します。
発熱低減の戦略は以下の通りです。
- 駆動電圧を最小化する。 十分な力を確保できる最低電圧で動作させます。誘電損失はV²に比例します。
- ハードPZTを使用する。 PZT-8の損失正接はPZT-4の約半分、PZT-5Aの約5分の1です。
- デューティサイクルを低減する。 アプリケーションが許す場合、モータを素早く移動させた後、電源オフで位置を保持します(モータのセルフロッキング特性により、無給電で保持力が得られます)。
- バーストモードで動作する。 位置決め用途では、移動時のみ駆動を印加し、保持にはモータのセルフロッキング摩擦を利用します。ピーク消費電力1 Wで50%デューティサイクルのモータは、平均発熱0.5 Wです。デューティサイクルを10%(短時間の高速移動と長い保持期間)に低減すれば平均は0.1 Wとなり、ほとんどのステータで温度上昇をごくわずかに抑えられます。
- 予圧を最適化する。 過大な予圧は有用な力を比例的に増加させることなく摩擦発熱を増大させます。
放熱
- 熱伝導経路。 ステータを良好な接触(真空中ではサーマルグリースまたはインジウム箔界面)で熱伝導性の高いベースに取り付けます。アルミニウムや銅のブラケットで熱をヒートシンクまたは装置フレームに伝導させます。
- 強制空冷(大気中のアプリケーション)。わずかな気流でもステータの温度上昇を大幅に低減します。1 m/sの気流を供給する小型ファンで温度上昇を50から70%低減可能です。
- サーマルストラップ(真空中のアプリケーション)。フレキシブル銅ブレイドまたはストラップでモータマウントと温度制御面を接続します。
- ペルチェクーラー。 ステータ温度を1から2 °C以内に維持する必要がある精密用途では、熱電冷却器でモータ温度を能動的に制御できます。複雑さと消費電力が増加しますが、熱ドリフトを排除できます。
熱的安定性のための設計
- 対称的なステータ設計。 熱的に対称なステータは均一に膨張し、寸法が変化してもモード形状を維持します。非対称な加熱はモード歪みを引き起こし、周波数シフト単独の予測を超えてモータ効率を低下させます。
- InvarまたはチタンのステータToday。 低CTE材料は寸法変化と予圧シフトを低減します。チタン(CTE = 8.6 × 10⁻⁶ /°C)はステンレス鋼の約半分の膨張率です。
- 温度補償された予圧。 モータの熱膨張が予圧スプリングマウントの膨張で相殺されるよう予圧機構を設計すれば、温度範囲にわたって一定の予圧を維持できます。慎重な機械設計と材料選定が必要です。
- 熱的に分離されたマウント。 低熱伝導性スペーサー(セラミックワッシャーなど)でモータをステージ構造体から絶縁すれば、モータの自己発熱がステージの位置安定性に影響するのを防止できます。ただし、モータ自体はより高温になるというトレードオフがあります。
PZT組成別の温度範囲
PZT組成の選択が使用可能な温度範囲を決定します。
標準ハードPZT(PZT-4、PZT-8):-40 °Cから+200 °C
産業用および科学用途の大多数に適しています。温度に対する性能劣化は緩やかであり、200 °C以下では急激な障害は発生しません。キャリブレーション温度からのΔTが15 °Cを超える場合は共振周波数追従が必要です。
ソフトPZT(PZT-5A、PZT-5H):-40 °Cから+80 °C
ソフト組成は低Qmのため超音波モータではほとんど使用されませんが、一部のセンサ・アクチュエータハイブリッド設計に採用されています。キュリー温度が低く温度感度が高いため、高温環境には不向きです。
高温組成:300 °Cまで
チタン酸ビスマス(Bi₄Ti₃O₁₂)、マンガンやアンチモンドープされた改良PZT、その他の特殊組成は、より高い温度で動作できます。ダウンホール石油・ガスアプリケーション、ジェットエンジン監視、原子力計装に使用されます。圧電定数は標準PZTより低いため、モータの力と速度は低下します。
極低温動作:4 Kまで
PZTは極低温でも圧電活性を保持しますが、各定数は大幅に低下します。77 K(液体窒素温度)ではd₃₃は室温値の60から70%になります。4 K(液体ヘリウム温度)では40から50%に低下します。セラミックの硬化により共振周波数は2から4%上昇します。これらの変化は予測可能であり補償できるため、クライオスタット、希釈冷凍機、宇宙機器での極低温ピエゾモータの使用は実用的です。
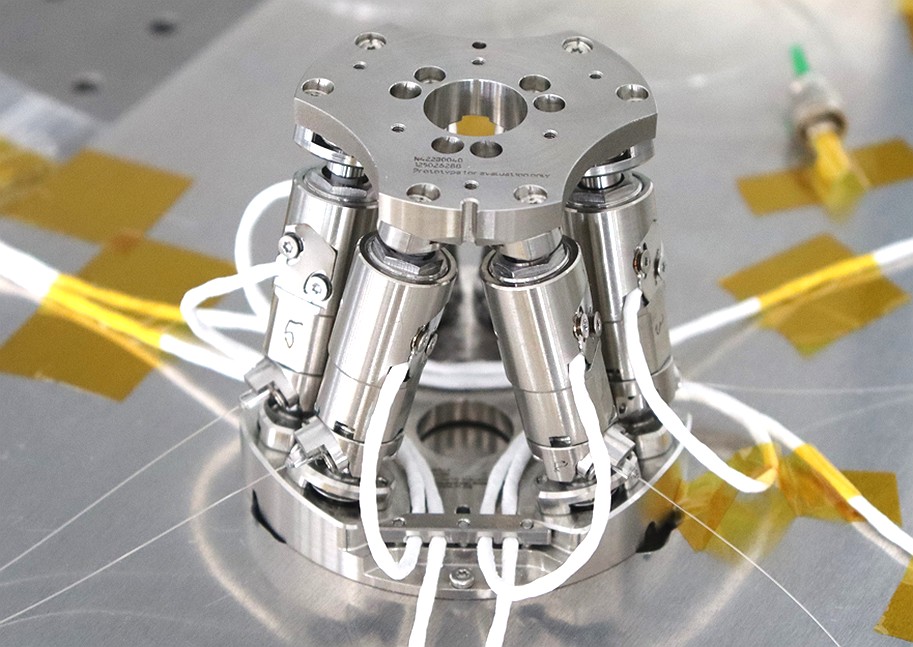
Image: 量子技術アプリケーション向けのPI極低温ヘキサポッド。6本の圧電脚部が、d₃₃が室温値の40から50%に低下する液体ヘリウム温度でもサブマイクロンの位置決め精度を実現する。Source: Physik Instrumente (PI)
設計例:ステータ周波数シフトの予測
Langevin型超音波モータの室温における共振周波数は40.00 kHzです。ステータはステンレス鋼本体に接合されたPZT-8セラミックを使用しています。共振周波数の温度係数は-0.03%/°Cと測定されています。
問題: モータは、雰囲気温度が20 °Cから50 °Cまで変化する筐体内で動作します。動作中のステータ自己発熱により、さらに15 °Cの温度上昇が加わります。駆動回路はどの程度の周波数追従範囲をサポートする必要がありますか。
解:
- ステータ最低温度:20 °C(雰囲気温度、モータオフ)
- ステータ最高温度:50 + 15 = 65 °C(最悪の雰囲気温度 + 自己発熱)
- 温度範囲:65 - 20 = 45 °C
- 周波数シフト:40,000 Hz × 0.03% × 45 = 540 Hz
- 必要な追従範囲:40,000 Hzから39,460 Hz(公称値から1.35%低下)
駆動回路は余裕を持たせて少なくとも±1.5%(±600 Hz)の追従範囲をサポートすべきです。キャプチャ範囲39,000から41,000 Hz(±2.5%)のPLLは保守的であり、容易に実現可能です。
Qmへの影響: 室温での機械的Qが800の場合、3 dB帯域幅は40,000/800 = 50 Hzです。PLLは帯域幅の10倍もの周波数シフトを追従する必要があり、固定周波数駆動がこのアプリケーションには完全に不適切であることが確認されます。
熱的効果がモータ寿命に及ぼす影響
温度上昇は複数の劣化メカニズムを加速します。
-
接着剤の接合劣化。 PZTと金属間のエポキシ接合は高温で弱化します。ほとんどの構造用エポキシはガラス転移温度(Tg)を超えると強度が低下し始めます。Tgは配合により80から200 °Cの範囲にあります。Tgから20 °C以内での動作はクリープと疲労を加速します。
-
PZTエージングの加速。 圧電セラミックはエージング(分極と特性の漸進的な喪失)を示します。エージング速度はアレニウスの関係に従い、分極温度から20から30 °C上昇するごとに約2倍になります。100 °Cでは、PZT-8素子は25 °Cで観測される速度の5から10倍でエージングする可能性があります。
-
摩擦界面の摩耗加速。 セラミックの摩耗率は、接触材料の表面化学と機械的特性の変化により温度とともに増加します。例えばアルミナは、湿潤環境では約200 °Cを超えると主に機械的摩耗からトリボケミカル摩耗に遷移します。
-
熱サイクル疲労。 加熱・冷却の繰り返しは、CTE不整合によりPZTと金属の接合にストレスを与えます。PZTのCTEは約4 × 10⁻⁶ /°C、ステンレス鋼は16 × 10⁻⁶ /°Cです。界面に生じるせん断応力はCTE差、温度振幅、接合面積に比例します。数千サイクルで剥離が発生する可能性があります。
寿命ディレーティングの定量化
温度がモータ寿命に及ぼす影響を推定するための実用的な目安として、主要な劣化メカニズムを組み合わせると以下の通りです。
| 動作温度 | 概算寿命ディレーティング係数 | 備考 |
|---|---|---|
| 25 °C(基準) | 1.0× | 基準となる実験室条件 |
| 50 °C | 0.7×から0.8× | 接着剤とPZTエージングの軽度な加速 |
| 80 °C | 0.3×から0.5× | 多くのエポキシでクリープ開始が顕著 |
| 100 °C | 0.15×から0.3× | 標準エポキシのTg付近。PZTエージングが5から10倍に加速 |
| 150 °C | 0.05×から0.1× | 高温用接着剤とPZT組成が必要 |
これらの係数は基準寿命(デューティサイクル、予圧、表面仕上げに依存)に対する乗数です。25 °Cで10,000時間の定格寿命を持つモータは、80 °Cでは1,500から3,000時間しか持たない可能性があります。高温での長寿命が求められるアプリケーションでは、高Tg接着剤(Tg 200 °C以上)、チタン製ステータ本体(CTE不整合の低減)、ハードPZT-8セラミックの採用が使用可能範囲を拡大します。
まとめ
温度は、超音波ピエゾモータの性能に影響を及ぼす最も重要な環境変数です。高温でのPZT軟化に起因する共振周波数シフト(ハード組成で約0.03%/°C)は、60 °Cの温度上昇で動作点を共振から外しモータを停止させ得ます。効果的な熱管理は3つの戦略を組み合わせます。適切な駆動パラメータとデューティサイクル管理による発熱の最小化、熱伝導経路と(利用可能な場合は)強制対流による放熱、そしてPLLまたはインピーダンス法による共振周波数の電子的追従です。これらの対策を講じることで、ピエゾモータは極低温から200 °Cまでの温度範囲で信頼性高く動作し、産業、科学、航空宇宙分野の大多数のアプリケーションをカバーできます。
実用的な熱試験プロトコル
熱的性能の検証には、対象アプリケーションの条件を再現した体系的な試験が必要です。実用的なプロトコルは4段階で構成されます。
段階1:ベースライン特性評価(雰囲気温度、無負荷)
ステータ温度が雰囲気温度から開始する状態で、公称駆動条件(電圧、周波数、予圧)でモータを動作させます。ステータ表面に接合した熱電対(K型、36 AWGで熱質量への擾乱を最小化)を使用してステータ温度対時間を記録します。定常状態(5分間で0.2 °C未満の変化)に達するまで継続します。定常状態の温度上昇と熱時定数を記録します。
段階2:デューティサイクルプロファイリング
アプリケーションで使用する各デューティサイクル(連続走査、間欠位置決め、最悪ケースのバーストプロファイル)について段階1を繰り返します。ピーク温度とその到達時間を記録します。モータの定格最大ステータ温度(標準接着剤システムで通常80から100 °C、高温システムで150 °C)と比較します。
段階3:周波数追従の検証
モータが定常状態の高温で動作している間、駆動回路が共振周波数にロックを維持していることを検証します。共振周波数シフトを記録し、温度係数からの予測値と比較します。PLLまたはインピーダンストラッカーが、全動作温度範囲に対して十分な余裕(観測されたシフトの少なくとも2倍)を持っていることを確認します。
段階4:高温での加速寿命試験
最大想定デューティサイクルおよび雰囲気温度で、少なくとも500時間(2000時間が望ましい)連続運転します。定期的にモータの力、速度、共振周波数、駆動電流を監視します。以下の項目を確認します。
- 力の漸進的な低下(部分脱分極または接着剤劣化の兆候)
- 温度予測値を超える共振周波数ドリフト(構造変化の兆候)
- 一定速度での駆動電流の増加(摩擦増大または圧電結合低下の兆候)
- 摩擦チップまたはランナー表面の目視可能な摩耗
このプロトコルにより、展開前に熱的故障モードを特定し、安全な動作限界を設定するために必要なデータが得られます。広い温度範囲のアプリケーション(UAVの高度・温度動作など)では、雰囲気温度範囲の両端でプロトコルを繰り返すことが推奨されます。