技術比較
圧電モータとステッパーモータの比較: 分解能、振動、そしてステップが精密の敵である理由
振動、マイクロステッピングの誤解、共振の罠、精密位置決めにおける圧電の定量的優位性
圧電モータとステッパーモータの比較: 分解能、振動、そしてステップが精密の敵である理由
ステッパーモータはコスト効率の高いモーション制御の代名詞である。安価で、標準化されたNEMAフレームサイズで多数のメーカーから入手可能であり、駆動が極めて単純。パルスを1つ送ればシャフトが1.8度回転する。エンコーダ不要、チューニング不要。NEMA 17のステッパーモータは5から50ドルで、ドライバ、リードスクリュー、リニアレールを含む完全な軸を200ドル以下で組み上げることができる。3Dプリンタ、CNCルーター、レーザカッター、ほとんどの産業自動化にとって、ステッパーモータは明白かつ正しい選択である。
しかし、「安価で簡単」には物理的な代償がある。ステッパーモータをシンプルにしているメカニズムそのもの、つまり電磁ディテントトルクによる離散的な角度ステップが、振動、共振、そして構造的かつ本質的な分解能限界を導入する。これらの限界は一般的な自動化では許容範囲内だが、精密位置決めでは失格要因となる。
本稿では、超音波圧電モータ技術に対するステッパーモータの限界を、実製品の具体的な数値、独立テストによる測定データ、詳細な計算例を用いて検証する。圧電モータが普遍的に優れていると主張する意図はない。そうではない。定量的精度をもって、一方の技術が他方に取って代わるべき境界をマッピングすることが目的である。
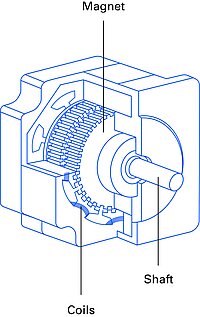 ハイブリッドステッパーモータ断面。歯付きロータと電磁ディテント機構が、精密位置決めを制限する離散ステップ、共振、振動を生成する。出典: PI
ハイブリッドステッパーモータ断面。歯付きロータと電磁ディテント機構が、精密位置決めを制限する離散ステップ、共振、振動を生成する。出典: PI
 SmarAct SLC-2445 小型圧電ステージ(ビー玉と共に)。13 gでサブナノメートル分解能とゼロ電力保持を実現し、同等のステッパーアセンブリの約1/40の質量。出典: SmarAct
SmarAct SLC-2445 小型圧電ステージ(ビー玉と共に)。13 gでサブナノメートル分解能とゼロ電力保持を実現し、同等のステッパーアセンブリの約1/40の質量。出典: SmarAct
| パラメータ | 圧電 | ステッピング |
|---|---|---|
| 分解能 | 0.5 nm | 1-5 um |
| 速度 | up to 800 mm/s | up to 1000 mm/s |
| 推力 | 0.5-20 N | 1-100 N |
| 保持力 | 無制限 | 通電時は高い |
| 真空適合性 | 優秀 | 不適(潤滑剤) |
| EMI | なし | 普通 |
| 寿命 | 5000+ km | 10000+ hrs |
| コスト | 高 | 低 |
基本動作原理
ステッパーモータの動作原理
ハイブリッドステッパーモータは永久磁石ロータと歯付き鉄製ポールピースおよびステータ巻線を組み合わせる。標準構成はロータ歯50個、2相で、1回転あたり200フルステップ(1ステップあたり1.8度)を生成する。コントローラが次の相巻線に通電すると、電磁トルクがロータを1歯ピッチ分前方に引き、永久磁石のディテントトルクが新しい位置にロータを固定する。
これは開ループ位置決めである。コントローラはパルスを計数し、ロータが追従していると仮定する。基本動作にはフィードバックセンサが不要で、これがステッパーの主な利点、すなわちシンプルさである。
一般的なサイズの主要な電気的・機械的パラメータ:
| パラメータ | NEMA 17 | NEMA 23 | NEMA 34 |
|---|---|---|---|
| ステップ角 | 1.8 deg (200ステップ/回転) | 1.8 deg (200ステップ/回転) | 1.8 deg (200ステップ/回転) |
| 保持トルク | 40~65 Ncm | 100~300 Ncm | 200~800 Ncm |
| 定格電流/相 | 1.5~2.0 A | 2.0~4.2 A | 3.0~6.0 A |
| 相抵抗 | 1.0~2.5 ohm | 0.5~1.8 ohm | 0.3~1.2 ohm |
| ロータ慣性 | 35~70 gcm^2 | 154~840 gcm^2 | 500~4,000 gcm^2 |
| ステップ精度 | +-3~5 arc-min (非累積) | +-3~5 arc-min | +-3~5 arc-min |
+-3 arc-minの精度仕様(Oriental Motor公表値、メーカー間で一致)は、各ステップが理想的な1.8度位置から最大0.05度偏差する可能性があることを意味する。これはモータ構造の機械的・磁気的特性であり、ドライバ電子回路では改善できない。
超音波圧電モータの動作原理
超音波圧電モータは圧電セラミック素子の高周波振動(通常20から200 kHz)を、接触界面での摩擦結合を介して連続的なリニアまたは回転運動に変換する。セラミックが超音波共振で振動し、接触チップが楕円軌道を描きプラットフォームを微小増分で前方に押し出す。毎秒数千から数百万回の反復である。
結果として得られるのは、離散的ではなく連続的な運動である。ステップもディテントトルクも角度インデックスもない。速度は振動振幅で制御される。位置は摩擦予圧によって受動的に保持され、静止時の電力消費はゼロ。この比較で重要な点は、固有の離散化がないことである。圧電モータは任意の増分で移動でき、エンコーダ分解能とコントローラノイズのみが制限要因となる。
 Nanomotion HR8 超音波モータ素子。セラミックチップが超音波で振動し、離散ステップのない連続運動を生成する。複数のHR素子を組み合わせてより大きな力を得ることが可能。出典: Nanomotion
Nanomotion HR8 超音波モータ素子。セラミックチップが超音波で振動し、離散ステップのない連続運動を生成する。複数のHR素子を組み合わせてより大きな力を得ることが可能。出典: Nanomotion
マイクロステッピングの誤解
これは本稿で最も重要なセクションである。ステッパーモータの仕様における最も一般的な誤解、すなわちマイクロステッピングが位置決め分解能を比例的に改善するという信念に取り組む。
マイクロステッピングの実際の効果
マイクロステッピングは、両相に正弦波状に変化する電流を同時に印加することで、各フルステップをより小さな増分に分割する。フルステップモード(一方の相にフル電流、他方にゼロ)ではなく、コントローラがロータをフルステップのディテント位置間に配置する中間電流比を生成する。
一般的なマイクロステップ分割は1/2、1/4、1/8、1/16、1/32、1/64、1/128、1/256。200ステップモータで1/256マイクロステッピングの場合、理論分解能は1.8 / 256 = 0.00703度/マイクロステップとなる。ピッチ2 mmのリードスクリューでは0.039マイクロメートル/マイクロステップである。
この理論値がデータシートに記載される数値である。しかし、およそ1/16以上のマイクロステッピングでは、この数値はほぼ架空のものとなる。
トルクの問題
各マイクロステップは隣接するマイクロステップ位置間のトルク差で保持される。マイクロステップ比が増加するにつれ、この増分トルクは急速に低下する。フルステップではモータ定格トルクの100%。1/2ステップでは約70.7%(sin 45度)。1/4ステップでは38.3%。関係は正弦関数に従い、高分割では限りなく小さな値になる。
1/256マイクロステッピングでは、各マイクロステップ位置でロータを保持するトルクは:
sin(180 / 256) = sin(0.703度) = 0.0123、つまりフルステップ保持トルクの1.23%
保持トルク50 NcmのNEMA 17モータの場合、1/256の各マイクロステップはわずか0.61 Ncmで保持される。モータ自身のディテントトルク(NEMA 17では通常3から8 Ncm、保持トルクの6%から16%)、ベアリング摩擦(1から3 Ncm)、リードスクリュー摩擦と比較してほしい。1/256のマイクロステップ保持トルクは外乱トルクより小さい。ロータは実際にはそれらの位置を分解できない。
保持トルク崩壊表
| マイクロステップ分割 | マイクロステップあたりのトルク (フルステップの%) | NEMA 17 50 Ncmでのトルク (Ncm) | ディテントトルクを超えるか? | ベアリング摩擦を超えるか? |
|---|---|---|---|---|
| フルステップ (1/1) | 100% | 50.0 | はい | はい |
| 1/2 | 70.7% | 35.4 | はい | はい |
| 1/4 | 38.3% | 19.1 | はい | はい |
| 1/8 | 19.5% | 9.8 | はい | はい |
| 1/16 | 9.8% | 4.9 | 限界的 (3~8 Ncmディテント) | はい |
| 1/32 | 4.9% | 2.5 | いいえ | 限界的 (1~3 Ncm) |
| 1/64 | 2.5% | 1.2 | いいえ | いいえ |
| 1/128 | 1.2% | 0.61 | いいえ | いいえ |
| 1/256 | 0.61% | 0.31 | いいえ | いいえ |
1/16を超えると、マイクロステップあたりのトルクはモータ自身のディテントトルク以下に低下する。1/32を超えるとベアリング摩擦以下になる。ロータは物理的にこれらの微細なマイクロステップ位置を分解できない。マイクロステップの電流プロファイルが生成できる力より大きな力に抗っている状態である。
測定データ: 証拠
独立テストが理論を裏付けている。Hackaday コミュニティで報告された測定(ステッパーモータエンジニアリングの文献で広く引用)では、同一のNEMA 17モータ(1.8度、200ステップ/回転)で3種類の主要なステッパードライバICをテストしている。
Allegro A4988(最大1/16マイクロステッピング): 1/16での位置誤差はマイクロステップサイズの約30%から50%。1/8までは運動のなめらかさの改善が明白だが、それ以上では精度が低下し、分解能の意味ある改善はなかった。
TI DRV8825(最大1/32マイクロステッピング): 1.8度モータで1/32の場合、絶対位置誤差は1ステップあたり約0.05度。理論マイクロステップサイズ(1/32)は0.05625度。誤差0.05度はマイクロステップサイズの89%に相当する。言い換えれば、誤差がステップそのものとほぼ同じ大きさである。マイクロステップは信号ではなくノイズである。
Toshiba TB6560AHQ(最大1/16マイクロステッピング): 同様の劣化パターン。1/8からマイクロステップ位置に測定可能な非線形性が生じる。
Oriental Motorは標準2相ステッパーモータのステップ精度仕様として+-3 arc-min/フルステップを公表している。1/256マイクロステッピングでの理論マイクロステップ角度は0.42 arc-min。メーカー自身の精度仕様がマイクロステップサイズの7.1倍大きい。モータは自身の固有角度誤差の7分の1の位置を分解できない。
マイクロステッピングの本当のメリット
マイクロステッピングには2つの真のメリットがある。
-
よりなめらかな運動。 フルステップあたりの複数の電流遷移がステップインパルスの振幅を劇的に低減し、よりなめらかな運動プロファイルと低振動をもたらす。これは確かに価値がある。
-
騒音低減。 ステップ周波数の高調波がより多くの小さな遷移に分散され、騒音が低減する。1/8マイクロステッピングのモータはフルステップと比べて明らかに静かである。
マイクロステッピングが提供しないのは、比例的に微細な位置決め精度である。1/8、せいぜい1/16を超えると、追加のマイクロステップ分割はなめらかさを向上させるが分解能は向上しない。1.8度 / (200 x 256) x 2 mm = 0.039 umという計算が正しいからといって「0.039 um分解能」とデータシートに記載するのは、算術的には正確だが実用的には誤解を招く。
マイクロステッピングの正直な分解能
| マイクロステッピング | 理論ステップサイズ (um、ピッチ2 mmねじ) | 達成可能分解能 (um、実測) | ギャップ倍率 |
|---|---|---|---|
| フルステップ | 10.0 | 10.0 | 1倍 |
| 1/2 | 5.0 | 5.0 | 1倍 |
| 1/4 | 2.5 | 2.5 | 1倍 |
| 1/8 | 1.25 | 1.2~1.3 | ~1倍 |
| 1/16 | 0.625 | 0.6~1.0 | 1~1.6倍 |
| 1/32 | 0.3125 | 0.5~1.0 | 1.6~3.2倍 |
| 1/64 | 0.156 | 0.5~1.0 | 3.2~6.4倍 |
| 1/128 | 0.078 | 0.5~1.0 | 6.4~12.8倍 |
| 1/256 | 0.039 | 0.5~1.0 | 12.8~25.6倍 |
達成可能分解能はマイクロステップ設定に関係なく0.5から1.0マイクロメートルで頭打ちとなる。このフロアはディテントトルク、摩擦、磁気的非理想性によって設定される。どのドライバチップでも、どれだけ多くのマイクロステップ分割をサポートしていても、このフロアを突破することはできない。これを下回る唯一の方法は外部エンコーダを用いた閉ループ制御であるが、それはステッパーの主な利点である開ループのシンプルさを排除する。
超音波圧電モータにはステップもディテントトルクもトルクリップルもない。最小増分運動は摩擦ダイナミクスとエンコーダ分解能で決まる。市販ステージは日常的に5から50 nmを達成しており、マイクロステッピングのステッパーが確実に提供できる値の10倍から200倍の精細さである。
共振: 隠れた性能キラー
ステッパーモータはばね・質量振動系である。ロータ(質量)は電磁復元トルク(ばね)によって各ステップ位置に保持される。系の固有振動数で加振されると、振動振幅は減衰せずに成長し、モータは同期を失い、ステップ脱落や停止に至る可能性がある。これは稀なエッジケースではなく、モータの物理的特性から予測可能な帰結であり、多くの精密アプリケーションの動作範囲に直撃する。
一次(低周波)共振
ロータ・荷重系の固有振動数は:
f_resonance = (1 / (2 x pi)) x sqrt(K_hold / J_total)
K_holdは電磁剛性(保持トルクに比例)、J_totalはロータ+荷重の合計慣性である。
NEMA 17モータ(保持トルク0.4 Nm、ロータ慣性54 gcm^2)で荷重慣性がロータ慣性と等しい場合(慣性マッチング、一般的な設計指針):
f_resonance ~ 200~400 Hz
ステップ周波数200 Hzでピッチ2 mmのリードスクリューを使用した場合、リニア速度は約0.4 mm/s。400 Hzで約0.8 mm/s。多くの精密スキャンおよび位置決めアプリケーションがまさにこの範囲で動作する。
共振時には各ステップが前回の振動を強化する。ロータは極位置を飛び越えるまで振幅を増大させて振動し、ステップ脱落が生じる。開ループ動作ではこれを検出するフィードバックがない。コントローラは軸が位置Xにあると信じているが、実際の位置は未知のステップ数だけずれている。
ミッドバンド共振: 200~500 RPM失速ゾーン
一次共振より上の速度域で、ステッパーモータは第二の不安定帯(一般にミッドバンド共振と呼ばれる)を示す。2相モータでは約200から500 RPMで発生する。モータの電気時定数(L/R)と高速域での逆起電力の相互作用が原因である。
ステッパーモータドライバメーカーのGeckoDriveはこの現象を詳細に記録している。ミッドバンド共振は、影響を受ける速度範囲に入ってから0.5から10秒以内にモータを停止させる場合がある。モータは正常に動作しているように見えるが、振動が徐々に蓄積し、ロータが同期を失って突然停止する。発生の予測は仕様書だけからでは困難である。
NEMA 23モータが200 RPMでピッチ5 mmのねじを駆動する場合、リニア速度は約16.7 mm/s。500 RPMでは約41.7 mm/s。これは位置決めステージの実用速度範囲のかなりの部分をカバーしている。
モータサイズ別の共振危険ゾーン
| モータサイズ | 低周波共振 | 等価リニア速度 (2 mmねじ) | ミッドバンド共振 | 等価リニア速度 (5 mmねじ) |
|---|---|---|---|---|
| NEMA 11 | 400~600 Hz | 0.8~1.2 mm/s | 2,000~4,000 Hz | 50~100 mm/s |
| NEMA 14 | 250~350 Hz | 0.5~0.7 mm/s | 1,500~3,000 Hz | 37~75 mm/s |
| NEMA 17 | 150~300 Hz | 0.3~0.6 mm/s | 1,000~3,000 Hz | 25~75 mm/s |
| NEMA 23 | 80~200 Hz | 0.16~0.4 mm/s | 500~2,000 Hz | 12~50 mm/s |
| NEMA 34 | 50~150 Hz | 0.1~0.3 mm/s | 300~1,500 Hz | 7.5~37 mm/s |
緩和策とその限界
マイクロステッピングはステップ遷移あたりの励振振幅を低減し、共振周波数へのエネルギー投入を抑える。効果はあるが共振を排除するものではない。固有振動数は変化せず、十分な励振(外部擾乱や蓄積されたドライブ誤差から)があれば不安定性が発生し得る。
粘性ダンピング(モータシャフトに機械ダンパーを追加)は共振ピークを広げて平坦化する。GeckoDriveはクリティカルなアプリケーションにこれを推奨している。代償は慣性の追加、コスト($50から$200)、連続エネルギー損失である。
電流プロファイリング(S字またはS型加速プロファイル)は速度ランプ中に共振周波数に滞在することを回避する。ポイント・トゥ・ポイントの移動には効果的だが、共振帯内の速度で連続動作が必要なアプリケーションには役立たない。
5相ステッパーモータ(Oriental Motor PKPシリーズ、0.36度/ステップ、1,000ステップ/回転)は、ステップインパルスエネルギーをより多くの小さな遷移に分散させることで共振振幅を低減する。PKPシリーズは+-2 arc-minのステップ精度(標準2相の+-3に対して)と1.2倍から1.5倍高いトルク密度を提供する。ただし、同等の2相モータの3倍から5倍のコストがかかり、振幅は低減されるものの依然としてディテントトルクと共振を示す。
圧電モータ: ステップなし、共振なし
超音波圧電モータは20から200 kHzで動作する。PI PILineシリーズは100から200 kHz。Xeryon XLSは80から180 kHz。これらの周波数は実用的な荷重構造の機械共振より2から3桁高い。
インパルス励起を生む離散ステップがない。共振するような電磁ばね・質量系がない。運動はすべての動作速度で連続的かつ滑らかである。「共振危険ゾーン」という概念自体が該当しない。
振動と騒音
ステッパーモータが発生する振動はランダムではなく、構造的で予測可能であり、精密測定を致命的に損なうことが多い。振動スペクトルの理解はステッパーの適合性を評価するために不可欠である。
ステッパーの振動スペクトル
一定速度で動作するステッパーモータは、基本ステップ周波数とその高調波で振動を発生させる。200ステップモータがピッチ2 mmのリードスクリューを1 mm/sで駆動する場合、基本ステップ周波数は100 Hzで、200、300、400 Hzと高調波が続く。
マイクロステッピングは基本波と低次高調波を低減する(1/256ではフルステップ比で10倍から200倍)。しかし、基本周波数の4倍に現れるディテントトルク成分は永久磁石と鉄の形状に由来する磁気的特性であり、マイクロステッピングに関係なく持続する。NEMA 17の実測データでは、1/256マイクロステッピングでもディテント振動は0.30から0.35マイクロメートル残留する。これがステッパー振動のハードフロアを設定する。
100 Hzから5 kHzの周波数範囲はほとんどの精密構造の機械帯域幅に直接重なる。ステッパーの振動は機械経路を通じて減衰しない。むしろ励起する。
圧電モータの振動スペクトル
超音波圧電モータが同じ荷重を駆動する場合、根本的に異なる周波数で振動を発生させる。
| 周波数範囲 | ステッパー振幅 (um) | 圧電振幅 (um) | 比 |
|---|---|---|---|
| 0~100 Hz | 0.5~1.5 | 0.001~0.005 | 100倍~1,000倍低い |
| 100~1,000 Hz | 0.3~1.2 | 0.002~0.01 | 30倍~600倍低い |
| 1~10 kHz | 0.05~0.4 | 0.001~0.005 | 10倍~400倍低い |
| 20~200 kHz | N/A | 0.01~0.1 | 超音波、荷重に伝達されない |
機械的に関連する帯域(0から10 kHz)での総振動は、圧電モータがマイクロステッピングされたステッパーの20倍から100倍低い。
騒音
可聴域での影響は劇的である。
| 動作条件 | NEMA 17 (dBA、1 m) | NEMA 23 (dBA、1 m) | 圧電モータ (dBA、1 m) |
|---|---|---|---|
| 保持 (通電、静止) | 25~30 | 28~35 | < 25 (聞こえない) |
| フルステップ、1 mm/s | 55~65 | 60~68 | 26~30 |
| 1/8マイクロステップ、1 mm/s | 38~52 | 42~55 | 26~30 |
| 1/256マイクロステップ、1 mm/s | 28~42 | 32~45 | 26~30 |
| 共振速度 | 65~75 | 70~80 | N/A |
1/256マイクロステッピングでもNEMA 17は静かな実験室(環境~30 dBA)で聞こえる。共振時のNEMA 23は70から80 dBAに達し、掃除機に匹敵する。圧電モータはすべての速度でオフィスの背景ノイズ以下で動作する。
医療用撮像室、顕微鏡ラボ、騒音が問題となるあらゆる環境では、差は量的ではなく質的である。ステッパーは聞こえるが、圧電モータは無音である。
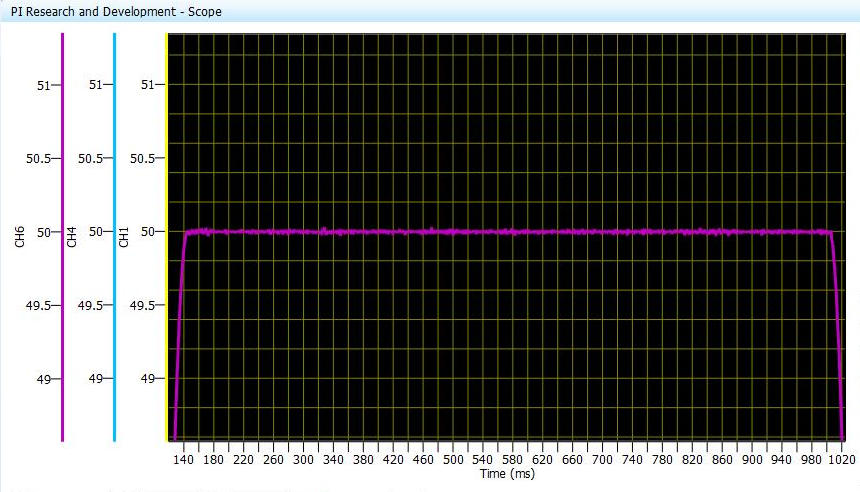 PIの研究開発部門によるオシロスコープトレース。ステップ移動後の圧電駆動ステージの位置安定性を表示。リンギングのない滑らかな整定は、ステッパーモータシステムに典型的なステップ誘起振動とは対照的。出典: PI
PIの研究開発部門によるオシロスコープトレース。ステップ移動後の圧電駆動ステージの位置安定性を表示。リンギングのない滑らかな整定は、ステッパーモータシステムに典型的なステップ誘起振動とは対照的。出典: PI
実製品での分解能比較
理論的な議論は、具体的な市販製品にマッピングすると具体性を増す。以下の比較は主要メーカーの公表仕様を使用し、利用可能な独立測定と照合している。
ステッパー駆動ステージ
PI M-112.1DG(代表的な精密ステッパーステージ):
- 可動域: 25 mm
- 駆動: NEMA 17ステッパー+精密リードスクリュー
- 最大速度: 1.5 mm/s
- 最小増分運動(MIM): 0.05 um (50 nm)、1/64マイクロステッピング
- 片方向繰り返し精度: 0.1 um
- 双方向繰り返し精度: 1 um(バックラッシュ制限)
- コスト: 構成に応じて約$2,000から$4,000
50 nm MIM仕様は精査に値する。これは管理された条件下で最適なマイクロステッピングを用いて片方向で測定された値である。双方向繰り返し精度は20倍悪い1 umで、実環境での位置決めを制限するバックラッシュと摩擦のフロアが露呈している。実際には、このステージは良好な片方向繰り返し精度で信頼性のある1 um位置決めを提供するが、サブマイクロメートルの双方向精度には慎重なアプローチ戦略が必要である。
圧電駆動ステージ
SmarAct SLC-1720(小型超音波圧電ステージ):
- 可動域: 12 mm
- 最大速度: >20 mm/s
- 分解能(閉ループ): ナノメートルエンコーダで<1 nm
- MIM: <1 nm
- 双方向繰り返し精度: +-40 nm
- 拘束力: 3.5 N
- 質量: 13 g
- コスト: 約$8,000から$15,000
Nanomotion HR4モータ素子(OEM部品):
- 停動力: 15~18 N
- 最大速度: 250 mm/s
- MIM: <10 nm
- 動作周波数: 超音波(非可聴)
- 速度範囲: 1 um/sから250 mm/s(5桁以上の速度範囲)
- コスト: モータ素子約$500から$1,500、完成ステージ$3,000から$8,000
PI N-664 NEXACT(超高精度圧電ステージ):
- 開ループ分解能: 0.03 nm
- 閉ループMIM: 2 nm(静電容量センサ使用)
- 可動域: 30 mm
- 静止時自己ロック(ゼロ消費電力保持)
- コスト: 約$8,000から$15,000
Xeryon XLS(コンパクト回転/リニア圧電ステージ):
- 最大速度: 1,000 mm/s
- エンコーダ分解能: 78 nm(Standard)、最小1 nm(Ultra)
- 静止時自己ロック
- 動作周波数: 80~180 kHz
- コスト: 約$2,000から$6,000
分解能比較サマリー
| 製品 | タイプ | 可動域 | MIM | 双方向繰返精度 | 速度 | 質量 | 概算コスト |
|---|---|---|---|---|---|---|---|
| PI M-112 | ステッパーステージ | 25 mm | 50 nm (片方向) | 1 um | 1.5 mm/s | ~500 g | $2,000~$4,000 |
| SmarAct SLC-1720 | 圧電ステージ | 12 mm | <1 nm | +-40 nm | >20 mm/s | 13 g | $8,000~$15,000 |
| Nanomotion HR4ステージ | 圧電ステージ | 可変 | <10 nm | <50 nm | 250 mm/s | 可変 | $3,000~$8,000 |
| PI N-664 NEXACT | 圧電ステージ | 30 mm | 0.03 nm (OL) | <50 nm | 中程度 | ~200 g | $8,000~$15,000 |
| Xeryon XLS | 圧電ステージ | 可変 | 1~78 nm | エンコーダ制限 | 1,000 mm/s | コンパクト | $2,000~$6,000 |
SmarAct SLC-1720は、PI M-112の38分の1の質量のパッケージで、25倍優れた双方向繰り返し精度を達成する。トレードオフはコスト(2倍から4倍高い)と可動域(12 mm対25 mm)。
 PI PILine U-521 超音波リニアステージ: 18 mm可動域、200 mm/sピーク速度、50 nm以下の分解能。ダイレクトドライブ設計がリードスクリューのバックラッシュ、ピッチ誤差、ステッパーベースステージを制限するカップリングコンプライアンスを排除。出典: PI
PI PILine U-521 超音波リニアステージ: 18 mm可動域、200 mm/sピーク速度、50 nm以下の分解能。ダイレクトドライブ設計がリードスクリューのバックラッシュ、ピッチ誤差、ステッパーベースステージを制限するカップリングコンプライアンスを排除。出典: PI
Nanomotion HR4は5桁の速度範囲(1 um/sから250 mm/s)にわたって10 nm以下のMIMを維持する。ステッパーモータにこれは不可能である。1 um/sでのステッパーは共振ゾーンの真っ只中にあり、安定した運動を維持できない。
圧電モータアーキテクチャ(進行波、定在波、ウォーキング、慣性型)のより広範な比較については、圧電モーション技術の比較の概要を参照されたい。
速度・力特性
ステッパーモータ: トルクが急降下する
ステッパーモータのトルクは速度の増加に伴い急激に低下する。メカニズムはモータ巻線の電気的時定数(L/R)である。ステップレートが増加すると、各相の電流波形は次の整流イベントまでに指令値に到達する時間が不足する。電流振幅が減少し、それに伴いトルクも減少する。
典型的なNEMA 23モータ(保持トルク300 Ncm)の場合:
| 速度 (RPM) | 利用可能トルク (Ncm) | トルク残存率 | リニア速度 (5 mmねじ) |
|---|---|---|---|
| 0 (保持) | 300 | 100% | 0 mm/s |
| 100 | 280 | 93% | 8.3 mm/s |
| 200 | 240 | 80% | 16.7 mm/s |
| 500 | 100~150 | 33~50% | 41.7 mm/s |
| 1,000 | 40~80 | 13~27% | 83.3 mm/s |
| 2,000 | 10~30 | 3~10% | 166.7 mm/s |
500 RPM以上では利用可能トルクが半減から3分の2に低下する。1,000 RPM以上ではモータ定格トルクの大部分が利用不能となる。高電圧ドライバ(24から80 Vのチョッパドライブ)は巻線への電流注入を高速化してトルクカーブを押し上げるが、根本的なL/R制限は変わらない。
この急峻なトルク降下は、速度時に十分なトルクを確保するためにはモータを大幅にオーバーサイズにする必要があることを意味する。保持条件では余剰の熱を放散することになる。あるいは、効率的な保持向けにサイズ選定されたモータは、中程度の速度で荷重下に失速する。
圧電モータ: 力は速度に依存しない
超音波圧電モータは摩擦結合により力を発生させ、モータの速度限界まで力は本質的に速度に依存しない。Nanomotion HR4は15から18 Nの停動力を持ち、1 um/sから250 mm/sの速度範囲で12から15 Nを維持する。
このフラットな力対速度特性は以下を意味する。
- 速度範囲内のいかなる動作点に対してもモータのオーバーサイズが不要。
- 特定の速度に「トルクデッドゾーン」がない。
- 速度範囲全体にわたって加速が均一(力/質量比に制限され、トルク低下には制限されない)。
- 同じモータが低速の精密スキャンと高速の再位置決めを性能劣化なしに処理。
速度・アプリケーションマッピング
| 速度範囲 | 典型的アプリケーション | ステッパー性能 | 圧電性能 | 優位 |
|---|---|---|---|---|
| <0.01 mm/s | ナノポジショニング、干渉計測 | 共振ゾーン、不安定 | 安定、サブnm分解能 | 圧電 |
| 0.01~1 mm/s | ファイバアライメント、プローブ顕微鏡 | 共振リスク、振動 | 滑らか、ナノメートル級 | 圧電 |
| 1~10 mm/s | 光学検査、計測 | マイクロステッピングで良好 | 優秀 | 圧電 |
| 10~50 mm/s | ウェーハプロービング、オートフォーカス | 良好 (共振超えた領域) | 良好 | 同等 |
| 50~200 mm/s | ピック・アンド・プレース、基板検査 | 良好 | 一部タイプで速度限界 | ステッパー |
| >200 mm/s | パッケージング、レーザ加工 | 優秀 | ほとんどの圧電の限界超え | ステッパー |
熱特性と保持時消費電力
ステッパーモータ: 保持時に100%の電力が熱になる
停止中のステッパーモータはアイドル状態ではない。保持トルクを維持しステップ脱落を防ぐために両相にフル定格電流を必要とする。この電流は銅線を流れ、電気入力の100%が抵抗熱となる。
NEMA 17モータ(定格2 A/相、1.1 ohm/相)の場合:
P_hold = 2相 x I^2 x R = 2 x (2.0)^2 x 1.1 = 8.8 W
モータが何もしていないときでも8.8ワットの連続発熱である。モータ筐体温度は自然対流で50から70度Cに達する。アクティブ冷却のない密閉筐体では90度Cを超える場合もある。
モータサイズ別の熱消費
| モータ | 定格電流 (A) | 抵抗 (ohm) | 保持時消費電力 (W) | 自然対流での筐体温度 (C) |
|---|---|---|---|---|
| NEMA 11, 0.5 A | 0.5 | 6.0 | 3.0 | 45~55 |
| NEMA 14, 0.8 A | 0.8 | 3.5 | 4.5 | 50~60 |
| NEMA 17, 1.5 A | 1.5 | 2.1 | 9.5 | 55~70 |
| NEMA 17, 2.0 A | 2.0 | 1.1 | 8.8 | 50~70 |
| NEMA 23, 2.8 A | 2.8 | 1.5 | 23.5 | 65~90 |
| NEMA 34, 4.0 A | 4.0 | 0.6 | 19.2 | 60~80 |
静止時の電流低減(定格の50から70%に低下)は発熱を50から75%削減するが、保持トルクが比例して低下し、外部振動や重力荷重によるステップ脱落のリスクが増加する。
熱ドリフトの問題
発熱はエネルギーの無駄にとどまらない。熱膨張を引き起こし、直接的に位置決め精度を劣化させる。密閉型顕微鏡XYステージ内の2台のNEMA 17モータを考える。合計保持時消費電力: 2 x 8.8 = 17.6 W。筐体の熱抵抗が~1.5 C/Wの場合、定常状態での温度上昇は26.4 Cで、22 Cの室温で筐体は48 Cに達する。
アルミニウムフレーム(23 ppm/C)と150 mmの光路長で、15 Cの温度勾配は52マイクロメートルの熱ドリフトを生じる。1 um精度を謳う計測器にとって、モータは何もしていない状態で目標誤差の52倍を導入している。
圧電モータ: 保持時ゼロ消費電力
超音波圧電モータは停止時に電力消費ゼロ。セラミックチップとガイドレール間の摩擦予圧が、電流なし、発熱なし、熱ドリフトなしで位置を受動的に保持する。これはエンジニアリング上の最適化ではなく、根本的な物理的差異である。
運動時の消費電力は通常1から5 Wで、小型から中型のステージ向けには十分低い。発熱は間欠的(運動中のみ)であり、絶対値も低い。
熱比較サマリー
| 条件 | ステッパー (NEMA 17) | 圧電モータ | 100 mm Alフレームへの影響 |
|---|---|---|---|
| 保持、フル電流 | 8.8 W連続 | 0 W | ステッパー: 10~20 umドリフト; 圧電: 0 |
| 保持、50%電流 | 2.2 W連続 | 0 W | ステッパー: 2~5 umドリフト; 圧電: 0 |
| 1 mm/s運動 | 10~15 W | 2~4 W | ステッパー: 12~25 umドリフト; 圧電: 2~5 um |
| 24時間保持 | 211 Wh消費 | 0 Wh | ステッパー: 定常熱勾配; 圧電: なし |
 PI N-565 NEXACT 圧電ステージ。保持時にゼロ電力消費であるため、ゼロ発熱、ゼロ熱ドリフト、無制限の保持時間を実現。連続通電を必要とするステッパーモータに対する根本的な熱力学的優位性。出典: PI
PI N-565 NEXACT 圧電ステージ。保持時にゼロ電力消費であるため、ゼロ発熱、ゼロ熱ドリフト、無制限の保持時間を実現。連続通電を必要とするステッパーモータに対する根本的な熱力学的優位性。出典: PI
長時間保持での温度安定性が要求されるアプリケーション(光学計測、電子顕微鏡、半導体検査)では、ステッパーモータの連続発熱は根本的な障害となる。対策(ヒートシンク、ファン冷却、断熱、水冷)はモータあたり$50から$500のハードウェアコストを追加し、ファン振動、気流擾乱、配管の複雑さ、結露リスクなど独自の問題を導入する。これらのコストがステッパーの価格優位性を侵食する。技術選定フレームワークでは、これらのトレードオフを評価する体系的アプローチを提供している。
閉ループステッパー: どこまで改善できるか?
閉ループステッパーシステムの登場により、従来のサーボ/ステッパーの境界線が曖昧になりつつある。Applied Motion StepSERVO(20,000カウント/回転エンコーダ搭載)やNanotec SC4118シリーズなどの製品は、ステッパーモータにエンコーダフィードバックを追加し、コントローラがリアルタイムでステップ脱落を検出・補正できるようにしている。Applied Motionは、開ループ動作と比較して750 RPM以下で85%多くの利用可能トルクを主張している。検出されないステップ脱落のリスクなしにモータをより強く駆動できるためである。
閉ループステッパーが解決すること
-
ステップ脱落の検出と補正。 エンコーダが各ステップの実行を検証する。ロータが遅れると、コントローラが電流を増加させるか速度を低減し、累積ドリフトを排除する。
-
共振管理。 コントローラが共振振動を検出し、駆動波形を調整する。一部のドライバはエンコーダフィードバックに基づく電流位相変調によりアクティブダンピングを実装する。
-
より積極的な加速。 ステップ検証により、コントローラは開ループ時の安全マージンなしにトルク限界に近い動作が可能。
閉ループステッパーが解決しないこと
-
機械的ステップ精度。 モータの歯形形状が+-5%/フルステップの精度誤差(+-3から5 arc-min)を生む。これは鉄ラミネーションと磁気回路の製造公差である。エンコーダは誤差を測定できるが、電磁ディテントを超えて理想位置にロータを強制することはできない。ディテント位置間の補間は、マイクロステッピングのセクションで説明したのと同じトルクおよび精度の制約に従う。
-
振動特性。 モータは依然として離散的なディテント位置で動作する。ステップインパルス励起は変わらない。閉ループ制御は整定時間を短縮するが、インパルスそのものは排除しない。
-
ディテントトルクと騒音。 いずれもモータの物理的特性である。ディテントトルクは持続し、コギング振動を生む。モータは依然としてステッピングし、可聴音を発生させる。電流プロファイル最適化は改善に寄与するが、根本を排除することはできない。
-
熱特性。 保持トルクには依然としてフル電流が必要。発熱は変わらない。
閉ループステッパーの結論
閉ループステッパーは、稀にステップ脱落が発生することが主な懸念であったアプリケーションにとって意味ある改善である。ステッパーの実用的な限界をおそらく5 umから2から3 umの信頼性ある位置決めにまで押し下げる。
しかし、ステッパーを異なるクラスのアクチュエータに変えるものではない。離散ステップ、ディテントトルク、共振、振動、熱消費は残る。サブマイクロメートル分解能、50 nm以下の繰り返し精度、ゼロ振動、ゼロ消費電力保持のいずれにおいても、閉ループステッパーは依然として不十分である。より良いステッパーではあるが、ダイレクトドライブ圧電の代替にはならない。
コスト比較
ステッパーと圧電のコスト比較は圧電採用に対する最も一般的な異議であり、ステッカー価格は全体像の一部にすぎないため、ニュアンスのある議論に値する。
部品レベルのコスト
| 部品 | ステッパーシステム | コスト範囲 |
|---|---|---|
| NEMA 17モータ | StepperOnline, OMC, Wantai | $5~$50 |
| NEMA 23モータ | StepperOnline, Oriental Motor | $20~$150 |
| ステッパードライバ (開ループ) | Allegro A4988, TI DRV8825, TMC2209 | $2~$50 |
| 閉ループステッパードライバ | Applied Motion StepSERVO, Nanotec | $150~$500 |
| リードスクリュー+ナット (標準) | Misumi, Thomson | $20~$100 |
| 精密リードスクリュー+アンチバックラッシュナット | THK, NSK | $200~$800 |
| リニアガイドレールペア | Hiwin, THK | $50~$300 |
| カップリング | Ruland, Helical | $15~$80 |
| 部品 | 圧電システム | コスト範囲 |
|---|---|---|
| 圧電モータ素子 | Nanomotion, PI, SmarAct | $500~$3,000 |
| 圧電モータコントローラ | PI E-727, SmarAct MCS2 | $500~$2,000 |
| 完成圧電リニアステージ | SmarAct SLC, Xeryon XLS | $2,000~$15,000 |
| 完成圧電リニアステージ | PI PILine, PI NEXACT | $5,000~$15,000 |
分解能目標別システムコスト
真の比較には同一性能仕様へのシステムマッチングが必要である。
| 分解能目標 | ステッパーシステムコスト | 必要構成 | 圧電システムコスト | 得られるもの |
|---|---|---|---|---|
| 10 um | $100~$300 | NEMA 17+ドライバ+ねじ | N/A (過剰) | N/A |
| 5 um | $200~$500 | NEMA 17+1/8ステップ+精密ねじ | $2,000~$4,000 | SmarActまたはXeryonベーシック |
| 1 um | $500~$1,500 | NEMA 17+1/32ステップ+精密ねじ+チューニング | $3,000~$6,000 | Xeryon XLSまたはPI PILine |
| 0.5 um | $1,500~$3,000 | ステッパー+エンコーダ+閉ループ+アンチバックラッシュ | $4,000~$8,000 | 標準圧電ステージ |
| 0.1 um | $3,000~$5,000 | ステッパー+リニアエンコーダ+閉ループ+熱管理 | $5,000~$10,000 | PI NEXACTまたはSmarAct |
| 0.01 um | 達成不可 | N/A | $8,000~$15,000 | PI N-664 NEXACT |
| 0.001 um | 達成不可 | N/A | $10,000~$20,000 | 超精密圧電 |
隠れたコストがギャップを埋める
0.5から2 um分解能(グレーゾーン)を目標とする場合、ステッパーシステムにはモータ価格に反映されないコストが蓄積する。
| 隠れたコスト | ステッパーシステム | 圧電システム |
|---|---|---|
| 外部リニアエンコーダ | $300~$1,500 | 含む |
| 閉ループドライバアップグレード | $150~$500 | 標準 |
| アンチバックラッシュリードスクリューナット | $100~$400 | N/A (ダイレクトドライブ) |
| 熱管理ハードウェア | $50~$300 | $0 |
| モータ振動絶縁 | $100~$500 | $0 |
| 共振回避 (ダンパー、プロファイリング) | $50~$200 | $0 |
| インテグレーション・チューニング工数 ($100/hr) | $800~$1,600 (8~16時間) | $200~$400 (2~4時間) |
| 隠れたコスト合計 | $1,550~$5,000 | $200~$400 |
1 um分解能の場合: 「安い」ステッパー軸は合計$2,050から$6,500。「高い」圧電ステージは合計$3,200から$6,400。コストギャップは崩壊し、圧電システムは振動、騒音、熱、信頼性の面で優れた性能を提供する。
コストクロスオーバーは約1から2 um分解能。 5 um以上ではステッパーがコストで明白に勝る。0.5 um以下では圧電のみが対応可能であり、コストの問題ではなくなる。1から5 umの間は、アプリケーション固有の二次要件(振動、騒音、熱、サイズ、真空適合性)に依存する。
アプリケーション判定シナリオ
シナリオ 1: 3Dプリンタ / デスクトップCNC
要件: 300 mm XY可動域、50 umレイヤ高さ、100 mm/sプリント速度、軸あたり$200予算、オープンソースコントローラ互換。
分析: 分解能(50 um)はステッパーのフロアの50倍粗い。速度(100 mm/s)はほとんどの圧電モータを超える。予算($200)はエントリーレベルの圧電の10分の1以下。オープンソースエコシステム(Marlin、Klipper、grbl)はステッパーインターフェース向けに構築されている。
結論: ステッパーモータ、圧倒的に。 NEMA 17にGT2ベルトまたはリードスクリューで、この価格帯で性能を提供する。
シナリオ 2: 共焦点顕微鏡オートフォーカス
要件: 10 mm Z可動域、100 nm位置決め分解能、撮像時の振動50 nm未満、実験室での無音動作、30秒露光時のフォーカス位置保持、コンパクト(対物レンズターレット下に収まる)。
分析: 100 nmの分解能はステッパーの信頼性あるマイクロステッピングフロア(0.5から1 um)以下。振動要件(50 nm未満)はステッパーを完全に除外する(ステッパーのディテント振動だけで300 nm以上)。無音動作はフルステップや中程度のマイクロステッピングさえ排除する。30秒の保持はステッパーの連続電流(対物レンズ下で発熱し、熱フォーカスドリフトを引き起こす)またはブレーキ機構を必要とする。コンパクトさではSmarAct SLC-1720(13 g)がNEMA 17ステッパーアセンブリ(~500 g)に対して有利。
結論: 圧電モータ、明白に。 SmarAct SLCシリーズまたはPI PILineステージがすべての要件を満たす。ステッパーは分解能、振動、騒音、熱の4項目(6要件中4つ)で不合格。
シナリオ 3: 光ファイバアライメント(フォトニックパッケージング)
要件: 6 mm XYZ可動域、5 nm以下の位置決め分解能、50 nm以下の双方向繰り返し精度、10分間の接着硬化中保持、非磁性(近傍にファイバブラッグ格子センサ)、真空対応バリアント。
分析: 5 nm分解能と50 nm繰り返し精度では、ステッパーモータのソリューションは存在しない。マイクロステッピングでは5 nmに到達できない。外部エンコーダ搭載の閉ループステッパーでも、リードスクリューバックラッシュにより信頼性ある繰り返し精度は約500 nmが上限。非磁性要件がすべての電磁モータ(ステッパーとサーボの両方)を不適格にする。真空要件がグリース潤滑リードスクリューを排除。硬化サイクル中の熱擾乱を回避するため、ゼロ消費電力保持が不可欠。
結論: 圧電モータ、唯一の実行可能な選択肢。 ナノメートルエンコーダ、クロスローラーベアリング、光学エンコーダ(磁性部品なし)を備えた3軸SmarAct SLCシステム。コスト: 3軸完成システムで$15,000から$30,000。これらの要件を満たすステッパーベースのシステムはいかなる価格帯にも存在しない。
シナリオ 4: 高速ピック・アンド・プレースアセンブリ
要件: 400 mm XY可動域、500 mm/sスルー速度、25 um配置精度、50 ms整定時間、24時間365日の工業運転、5年メンテナンス間隔、コスト重視(大量生産)。
分析: 500 mm/sの速度はほとんどの圧電モータを超える。25 umの精度はマイクロステッピングされたステッパーで容易に達成可能。24時間365日デューティサイクルと5年メンテナンス間隔は実績ある産業インフラが有利。400 mmの可動域はほとんどの圧電ステージを超える。
結論: ステッパーモータ(またはより高いスループットにはサーボ)。 NEMA 23にボールねじと1/8マイクロステッピングの組み合わせで、軸あたり$300から$800でこの速度での精度を実現。
実用的な推奨
ステッパーモータを選ぶ場合:
- 持続速度が50 mm/sを超える。 共振を超えるとステッパーのトルクは低下するが、多くの荷重に対して十分。
- 軸あたりの予算が$500以下。 この価格帯に圧電ソリューションは存在しない。
- 5 um以上の分解能で十分。 1/8から1/16のマイクロステッピングで確実に達成可能。
- 開ループのシンプルさが重視される。 エンコーダなし、チューニングなし、サーボループなし。
- コントローラエコシステムが重要。 ステッパーは数千の既製ドライバ、コントローラ、ソフトウェアパッケージと統合可能。
- 力が20 Nを超える。 ステッパー+リードスクリューで数百ニュートンが容易に得られる。
- デューティサイクルが高い。 ステッパーは最小限のメンテナンスで数万時間の連続運転に対応。
圧電モータを選ぶ場合:
- 1 um以下の分解能が必要。 マイクロステッピングでは確実に達成不可。圧電モータは日常的に1から50 nmを達成。
- 振動を最小化すべき。 超音波駆動周波数(20から200 kHz)は機械構造を励起しない。光学計測、顕微鏡、走査プローブ用途に不可欠。
- 騒音が聞こえてはならない。 圧電モータはすべての動作速度で無音。
- ゼロ消費電力保持が必要。 自己ロック摩擦保持で電流なし、発熱なし、熱ドリフトなし。長時間保持アプリケーションと温度感度の高い環境に不可欠。
- 環境が真空、クリーンルーム、または極低温。 圧電モータはパーティクル、潤滑剤アウトガス、保持時発熱なしで、広い温度範囲で動作。
- 非磁性動作が必要。 圧電モータは永久磁石も通電コイル(保持時)も持たない。電子ビーム、SQUID、ファイバブラッグ格子、MRIシステム近傍に不可欠。
- サイズと重量が重要。 SmarAct SLC-1720は13 g。同等のステッパーステージは500 g。多軸システム、チップ・チルトプラットフォーム、アクチュエータ質量が制御対象の動特性に影響するあらゆるアプリケーションで重要。
- 100 nm以下の双方向繰り返し精度が必要。 アンチバックラッシュ対策に関係なく、リードスクリューシステムはダイレクトドライブ圧電ステージの50 nm以下の双方向繰り返し精度に匹敵できない。
判定境界
ステッパーと圧電の境界は単一の線ではなく、複数のパラメータで定義されるゾーンである。ただし、簡略化した判断ルールがほとんどのケースをカバーする。
5 um以上の分解能、50 mm/s以上の速度、軸あたり$500以下で十分であれば、ステッパーが勝つ。 よりシンプルで安価、実績がある。深く考える必要はない。
1 um以下の分解能、またはゼロ振動、またはゼロ消費電力保持が必要であれば、圧電が勝つ。 ステッパーはマイクロステッピング比、閉ループフィードバック、ドライバの洗練度に関係なく、物理的にこれらを提供できない。
1から5 umの間では二次要因を評価する。 真空適合性、非磁性動作、無音運転、コンパクトサイズ、温度安定性が要求される場合、圧電モータの利点が蓄積し、高い価格が正当化される。これらの要因がいずれも重要でなければ、ステッパーが依然として経済的な選択肢である。
技術選定フレームワークではこの境界をナビゲートするための構造化された判定マトリクスを提供している。圧電対サーボ比較は性能スペクトルのより高い端をカバーし、ダイレクトドライブリニアサーボが圧電モータと競合する領域を扱う。量産環境での圧電モータの摩耗と寿命については専門記事を参照されたい。
 顕微鏡用圧電駆動オートフォーカスステージ: 典型的な「圧電テリトリー」のアプリケーション。コンパクトなZ焦点機構が100 nm分解能、撮像時のゼロ振動、無音動作を実現。いずれもステッパーモータでは達成不可能な要件である。出典: PI
顕微鏡用圧電駆動オートフォーカスステージ: 典型的な「圧電テリトリー」のアプリケーション。コンパクトなZ焦点機構が100 nm分解能、撮像時のゼロ振動、無音動作を実現。いずれもステッパーモータでは達成不可能な要件である。出典: PI