技術比較
圧電モーション技術の比較: 定在波、進行波、慣性駆動、そしてその先へ
圧電モーターおよびアクチュエータ技術の主要ファミリーにおける動作原理、性能領域、選定基準
はじめに
「圧電モーション」という用語は、驚くほど多様な技術ファミリーを包含しています。この分野に初めて触れるエンジニアは、混乱を招く用語の数々に直面するでしょう。スティックスリップ、慣性駆動、超音波モーター、ウォーキングモーター、インチワーム、SQUIGGLE、LEGS、PILine、PiezoWalk、Elliptec、Picomotorなど、各メーカーが独自の用語を推進しており、マーケティング用語ではある技術がどこで終わり、別の技術がどこから始まるのか、ほとんど明確にされていません。
この混乱は重要な問題です。なぜなら、これらの技術は相互に交換可能ではないからです。スティックスリップ駆動と定在波超音波モーターはどちらも圧電セラミックスを使用して運動を生み出しますが、根本的に異なる物理原理で動作し、異なる性能領域を持ち、異なる用途に適しています。特定の用途に対して誤った圧電技術を選択することは、モーターの種類自体を間違えるのと同じくらいコストのかかるミスです。圧電モーターと電磁モーターの違いについては、サーボモーターとの比較およびステッピングモーターとの比較で個別に解説しています。本記事では、圧電モーションの領域内における技術の全体像に焦点を当てます。
本記事の目的は、この技術領域を体系的に整理することです。各主要な圧電モーション技術について、動作原理、実際の仕様に基づく代表的な製品、そしてその技術が優位性を発揮する性能領域を解説します。記事の最後には、技術間の横断的な比較表と、技術選択のための実践的な判断フレームワークを提示します。
範囲に関する注記: 本記事では2025年時点で商業的に入手可能な技術を対象とし、仕様はメーカーのデータシートおよび公表文献から引用しています。研究段階のコンセプト(圧電MEMS モーター、磁気電気ハイブリッド駆動など)は、商業生産に至っていない限り除外しています。
超音波共振モーター(定在波)
定在波超音波モーターは、精密位置決めにおいて最も広く普及している圧電モーター技術です。動作原理は、機械的共振周波数(通常40~200 kHz)で振動する圧電ステーター素子に基づいており、摩擦チップまたは接触面がミクロスケールで楕円軌道を描きます。この楕円運動は、同時に励起される縦振動モードと曲げ振動モードの組み合わせであり、セラミック製のドライブロッドまたはランナーを摩擦結合によって駆動します。共振周波数とステーター形状がモーターの帯域幅と性能をどのように決定するかの物理学については、専用の記事で詳しく解説しています。
重要なポイントは、ステーターが超音波周波数で連続的に振動する一方、ランナーの巨視的な運動は滑らかかつ連続的であり、ステップ状ではないということです。速度は振動振幅(駆動電圧や共振からの周波数オフセットによる)を変化させることで制御され、方向は励起信号間の位相関係を変更することで反転されます。接触チップは振動サイクルごと(毎秒25,000~200,000回)にランナー表面と係合するため、実効的なステップサイズはサブナノメートルとなり、これらのモーターは非常に精密な速度制御を実現します。

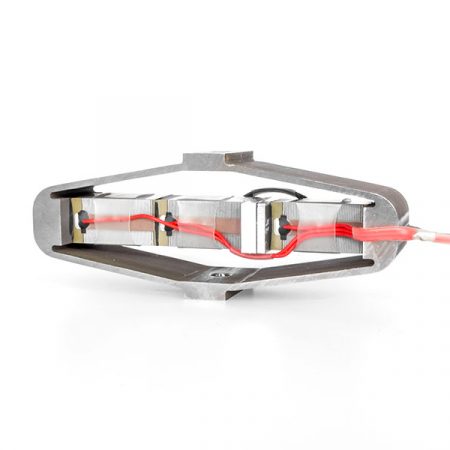
画像: Nanomotion Edgeモーター素子。長方形のPZTステーター、セラミック摩擦チップ、ドライブロッドが見える。出典: Nanomotion
楕円運動の発生原理
ほとんどの定在波リニアモーターは、対向する面に2つの圧電素子を接合した長方形プレートステーターを使用します。駆動回路は2つの振動モードを同時に励起します。縦モード(ステーターの長さ方向に変位を生成)と曲げモード(接触面に垂直な方向に変位を生成)です。これら2つのモードを同じ周波数で90度の位相オフセットをもって励起すると、先端は楕円軌道を描きます。楕円の前半では、先端がランナーに接触して押し出します。後半では、先端が離れ(または少なくとも接触力を低下させ)、後退します。その正味の効果が、一方向への連続的な運動です。
これを実現するためには、縦モードと曲げモードがほぼ同一の共振周波数を持つようにステーターを精密に設計する必要があります。この条件をモーダル縮退と呼びます。製造公差内でこの縮退を達成することが、定在波モーター設計における主要な工学的課題の一つです。
代表的な製品と仕様
Nanomotion EdgeおよびHRシリーズ。 Nanomotion(現在はCelera Motion / Novantaの一部)は、マルチエレメント型定在波モーターのコンセプトを開拓しました。HRシリーズは、セラミックストリップに押し付けられた複数のフィンガー状ステーター素子を使用します。Edgeモーターは素子あたり0.5~3.5 Nの力を発生し、最大速度は250 mm/sです。適切なエンコーダーを使用すれば、分解能は1 nm以下に達します。複数の素子を連結してより高い力を得ることも可能で(HR8は8フィンガーで最大28 N)、動作周波数は約39.6 kHzです。これらのモーターは、半導体検査、フォトニクスアライメント、医療機器で広く使用されています。
PI PILineシリーズ。 Physik InstrumenteのPILineモーターは、金属ステーター本体に接合された長方形の圧電セラミックプレートを使用します。単一のセラミック摩擦チップがアルミナドライブロッドと接触します。U-264 OEMモジュールは約2 Nの力を発生し、最大400 mm/s(利用可能な最速の定在波設計の一つ)の速度に対応します。分解能はエンコーダーに依存しますが、通常50 nmに到達し、高精度エンコーダーでは5 nm以下になります。ストロークはドライブロッドの長さのみに制限され、標準ステージでは13~305 mmの範囲です。PILine技術に基づくN-664 NEXACTステージは、静電容量センサーで0.03 nmの分解能を達成します。
New Scale Technologies SQUIGGLE。 SQUIGGLEモーターは、4枚の圧電プレートを接合した中空の正方形チューブという独特な構造を持ちます。プレートを順番に励起すると、チューブを周回する定在波が生成され、中央のネジがアセンブリを貫通して移動します。その結果、2.8 x 2.8 x 6 mmのパッケージに収まる回転直動変換モーターとなります。力は0.5 N、速度は7 mm/s、ストロークはネジ付きロッドの長さ(標準構成で最大6 mm)に依存します。SQUIGGLEは、小型カメラのオートフォーカス、内視鏡先端の位置決め、サイズが最優先制約となるポータブル医療機器で広く使用されています。

画像: PI U-521 PILineミニチュアリニアステージ。統合型定在波超音波モーターシステム。出典: Physik Instrumente (PI)
Xeryon Crossfixx。 Xeryon独自のクロスバネ機構は、統合型リニアエンコーダーを備えた定在波モーターを使用し、コンパクトな閉ループステージとして提供されています。XLSシリーズは最大40 mmのストローク、150 mm/sの速度、5 Nの力、50 nmの双方向繰り返し精度を備えています。半導体および宇宙用途向けの真空対応バリアントも利用可能です。
画像: Xeryon XLS超音波リニアステージ、Crossfixxピエゾモーター搭載。出典: Xeryon
Thorlabs Elliptec。 Thorlabsは、スライダーおよび回転ステージ用にElliptec共振モーターモジュールをライセンス提供しています。これらは約100 kHzで動作するコンパクトで低コストなモジュールであり、最大200 mm/sの速度と約1 Nの力を備えています。計器内のビームステアリング、フィルターホイール回転、光路切り替えを対象としています。
性能領域
定在波モーターは、中程度の速度(1400 mm/s)、中程度の力(0.530 N)、非常に高い分解能(適切なフィードバックでサブナノメートル)の領域で優れた性能を発揮します。電源をオフにすると自己保持し、静止時の消費電流はゼロです。摩擦インターフェースでの摩耗が寿命を制限しており、通常は5,00020,000時間のアクティブ動作、または10,000100,000 kmの累積移動距離です(寿命と摩耗を参照)。磁場の発生がほとんどないため、電子ビームやMRI近傍の用途に適しています。
進行波モーター
進行波モーターは、リング状のステーター周囲を伝搬する曲げ波を生成することで、連続的な回転運動を実現します。振動パターンが静止し、摩擦チップが一方向に押し出す定在波モーターとは異なり、進行波は水面の波のようにステーター上を物理的に移動します。ステーター表面の各点は楕円軌道を描き、表面に押し付けられたローターがその波に乗って動きます。
動作原理
リングステーターは、4分の1波長分空間的にオフセットされた2組の電極によって励起され、90度位相がずれた正弦波信号で駆動されます。これにより、2つの定在波が合成されて1つの進行波となります。各表面点は逆行楕円を描きます。波の頂点が通過すると、表面は後方(波の伝搬方向と逆方向)に移動し、摩擦接触がローターをその後方向に駆動します。したがって、ローターは波の伝搬方向と反対に回転します。
ステーター上の波速はステーター材料の特性と形状によって決まります。ローターの速度は波速の一部であり、接触面でのスリップによって減少します。典型的なスリップ比は5%~30%で、荷重と予圧力に依存します。
Canon USMとその影響
商業的に最も成功した進行波モーターは、1987年にカメラのオートフォーカスレンズ用に導入されたCanonの超音波モーター(USM)です。USMは、3045 kHz付近で動作するB(0,9)曲げモードを持つリングステーターを使用します。0.31.5 Nmのトルクを最大100 RPMで発生し、静止からの起動は50 ms以内です。Nikon、Minolta(現Sony)、その他のカメラメーカーも同様の仕様で独自の進行波モーターを開発しました。これまでに数千万個のモーターが製造されています。
カメラ用途で進行波モーターが採用される理由は以下の通りです。運動が滑らか(ステッピングやパルスがない)であること、超音波動作周波数で無音であること、リング形状が円筒形レンズバレルに自然に適合すること、そして無通電時に自己保持してレンズ位置をバッテリー消耗なしに維持できることです。
産業用バリアント
一般消費者向け光学製品以外では、進行波モーターは定在波タイプほど精密位置決めで普及していません。主な産業用サプライヤーは以下の通りです。
Shinsei Corporation。 Shinsei(日本)は、直径30~100 mmのUSRシリーズ進行波回転モーターを製造しています。USR-60(外径60 mm)はピークトルク0.5 Nm、保持トルク1.0 Nm、最大100 RPMで動作します。動作周波数は約40 kHzです。これらのモーターは、ロボット関節、アンテナポジショナー、光学機器ターレットに使用されています。
PI (Physik Instrumente)。 PIは、自己保持性を備えた滑らかでバックラッシュフリーの回転を必要とする用途向けに、U-6xxシリーズの進行波回転ステージを提供しています。トルクは0.1~0.8 Nm、速度は最大120 RPMです。
ニッチベンダーおよびカスタム設計。 いくつかの小規模メーカー(デンマークのPCBMotor、日本のPiezo Sonic)が、特定のトルク、速度、フォームファクター要件に合わせてカスタマイズされた進行波モーターを製造しています。
長所と限界
進行波モーターは、ステーター上のすべての点が同時にローターの駆動に寄与するため、局所的な接触不均一性が平均化され、定在波タイプよりも滑らかな運動を提供します。本質的に回転型であり、ターレット、ダイヤル、ジンバル用途では利点ですが、リニア運動が必要な場合には不利です。速度は中程度(小型モーターで最大150 RPM)、トルクも控えめ(0.1~2 Nm)です。効率は比較的低く、通常25%~50%で、エネルギーはステーターの内部減衰と接触インターフェースの両方で散逸します。
二相駆動の要件は、単相の定在波モーターと比較して電子回路の複雑さを増加させ、リングステーターは単純な長方形プレートよりも製造が困難でコストが高くなります。これらの理由から、進行波モーターは一般的に、その固有の利点(滑らかな回転運動、自己保持、静音性、リング形状)がコストと複雑さのペナルティを上回る場合にのみ選択されます。
スティックスリップ(慣性)駆動
スティックスリップモーター(慣性駆動とも呼ばれる)は、共振超音波モーターとは全く異なる原理を使用します。共振で連続振動させる代わりに、スティックスリップ駆動では、プラットフォームやガイドに接合された圧電アクチュエータに非対称波形(通常はのこぎり波または変形のこぎり波)を印加します。緩やかなランプ相(「スティック」)では、アクチュエータが徐々に伸長し、移動プラットフォームとスライディングエレメント間の摩擦により両者が一体となって移動します。急速な後退相(「スリップ」)では、アクチュエータが素早く収縮し、スライディングエレメントの慣性によりその場に留まる一方、アクチュエータは元の位置に戻ります。1サイクルあたりの正味の結果は、一方向への小さなステップです。

画像: SmarAct SLC-2430スティックスリップポジショナー。慣性駆動ステージに典型的なコンパクトなフォームファクターを示す。出典: SmarAct
ステップの物理学
サイクルあたりのステップサイズは、圧電アクチュエータのストローク(通常0.15 um)、波形形状、摩擦係数、可動部品間の質量比、駆動周波数に依存します。1020 kHzの駆動周波数では、スティックスリップモーターは毎秒数千ステップを生成し、各ステップはマイクロメートルの数分の一です。その累積効果は、通常0.5~20 mm/sの速度での滑らかな巨視的運動です。
このアプローチの美点は、移動距離に制限がないことです。圧電アクチュエータは1サイクルあたり数マイクロメートルしか変位しませんが、ステッピングは無制限に繰り返されます。移動距離はガイドレールの長さのみに制限され、アクチュエータのストロークには制限されません。これにより、スティックスリップモーターはスタック伸長範囲に制限される圧電スタックアクチュエータと区別されます。
分解能は最小ステップサイズによって決定され、駆動電圧を下げることで制御できます。市販のスティックスリップポジショナーは、開ループで100 nm以下、閉ループエンコーダーフィードバックで1 nm以下のステップサイズを日常的に達成しています。
代表的な製品
SmarAct SLCおよびSLC-24シリーズ。 SmarAct(ドイツ)は、スティックスリップポジショナーの主要メーカーです。SLC-1730は、21 mmのストローク、1 nmの分解能(統合型ナノメトリックセンサーによる閉ループ)、20 mm/sの速度、1.5 Nの駆動力を提供します。コンパクトなフォームファクター(アクチュエータヘッドで17 x 17 x 7.5 mm)により、高密度な多軸アセンブリが可能です。SmarActの主な差別化要因は統合センサーです。SCL(SmarAct Closed Loop)技術は、独自のナノメトリックエンコーダーをポジショナー内に直接搭載し、外部エンコーダーの取り付けを不要にしています。PICOSCALEレーザー干渉計オプションは1 pmの分解能を達成します。真空対応(10^-9 mbar)および極低温(4 K)バリアントは標準カタログ品です。
attocube ANPx、ANPz、ANRシリーズ。 attocube systems(ドイツ、現在はWittensteinの一部)は、極端環境向けスティックスリップポジショナーの先駆者です。ANPx101リニアポジショナーは、5 mmのストローク、200 nmのステップサイズ(開ループ)、最大3 mm/sの速度を提供し、10 mK~300 Kの温度範囲および最大31 Tの磁場中で動作します。力は約0.5 Nです。これらのユニットは低温走査プローブ顕微鏡のワークホースであり、世界中の数千台のクライオスタットに設置されています。
MKS/Newport Picomotor。 Picomotorは、圧電素子を使用してスライディングジョーに対してファインピッチスクリューを回転させる、長年の実績があるスティックスリップ製品です。ステップサイズは約30 nmで、モデルにより最大22 Nの力を発生します。速度は控えめで約1~3 mm/sです。Picomotorの強みはシンプルさにあります。ステップが十分に予測可能であるため、多くのアライメント用途でエンコーダーが不要です。光学マウントの調整、ミラーアライメント、実験室用治具で広く使用されています。
Thorlabs PIAシリーズおよびORIC。 Thorlabsは、それぞれ6 mmと16 mmのストロークを持つPIA13およびPIA25V慣性アクチュエータを提供しています。ステップサイズは駆動電圧に応じて20 nm~5 umの範囲です。速度は最大5 mm/sに達します。ORIC(Optical Rail Inertia Carriage)は、モジュラー光学セットアップ用にダブテールレールにPIAアクチュエータを統合したものです。
mechOnics MSおよびナノポジショナーシリーズ。 mechOnics(ドイツ)は、顕微鏡およびナノファブリケーション用のスティックスリップナノポジショナーを提供しています。MS30は、12 mmのストロークで50 nmまでのステップサイズを提供し、閉ループ動作用の統合光学エンコーダーを備えています。

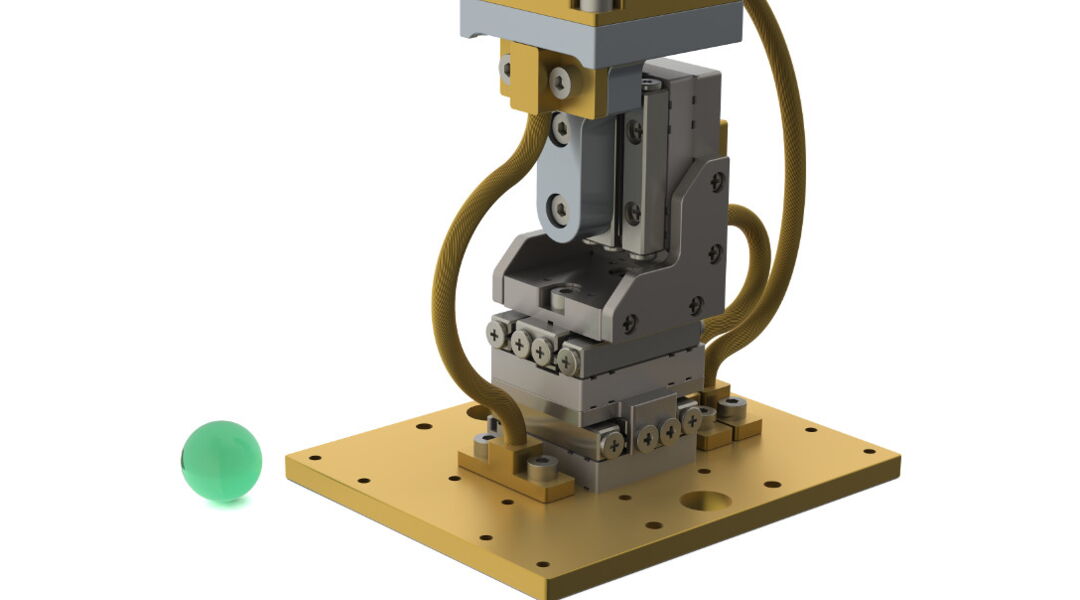
画像: SmarAct SLC-2445ポジショナーとスケール参照用のガラス玉。スティックスリップ技術で達成可能なミニチュア寸法を示している。出典: SmarAct
極端環境でスティックスリップが優位な理由
スティックスリップ駆動の決定的な利点は、環境適応性です。動作原理が共振や連続振動ではなく、慣性と摩擦に依存しているため、スティックスリップモーターは極低温(ミリケルビンまで)、超高真空(10^-11 mbar)、強磁場中、放射線環境で動作します。圧電アクチュエータは、コイルなし、潤滑剤なし、有機材料なし(最良の設計では)のモノリシックセラミックです。摩擦インターフェースはセラミック同士またはサファイア同士です。
画像: SmarAct XYZ極低温ポジショナースタック。10 mKまでの温度で希釈冷凍機内での動作用に設計。出典: SmarAct
他の圧電モーター技術で、この環境範囲に匹敵するものはありません。定在波モーターはポリマー接着アセンブリと予圧バネに依存しており、極低温サイクルに耐えられない可能性があります。進行波モーターはエポキシ接着を使用し、低温では大きく変化する一貫した摩擦係数に依存しています。attocubeおよびSmarActのスティックスリップポジショナーは、10 mKの希釈冷凍機内で日常的に動作しますが、これは共振超音波モーターでは不可能です。
トレードオフは性能面にあります。スティックスリップモーターは速度が遅く(定在波の50400 mm/sに対して通常120 mm/s)、力も小さい(マルチエレメント定在波モーターの230 Nに対して0.35 N)です。また、本質的にステップ状の運動を示すため、閉ループ制御で平滑化しない限り、低速域で速度リップルが生じる可能性があります。
ウォーキング(インチワーム)モーター
ウォーキングモーター(インチワームモーター、クランプ・ステップ・リリースモーターとも呼ばれる)は、複数の圧電アクチュエータを二足歩行に似た順次グリッピングサイクルで協調させます。原理は以下の通りです。1組のアクチュエータが荷重をクランプし、2組目が伸長して前進させ、1組目がリリースし、2組目が次のステップの準備のために後退します。複数のアクチュエータグループのサイクルを重ねることで、モーターはプッシュ相で摺動摩擦のない、非常に高い力を持つ準連続運動を生成します。

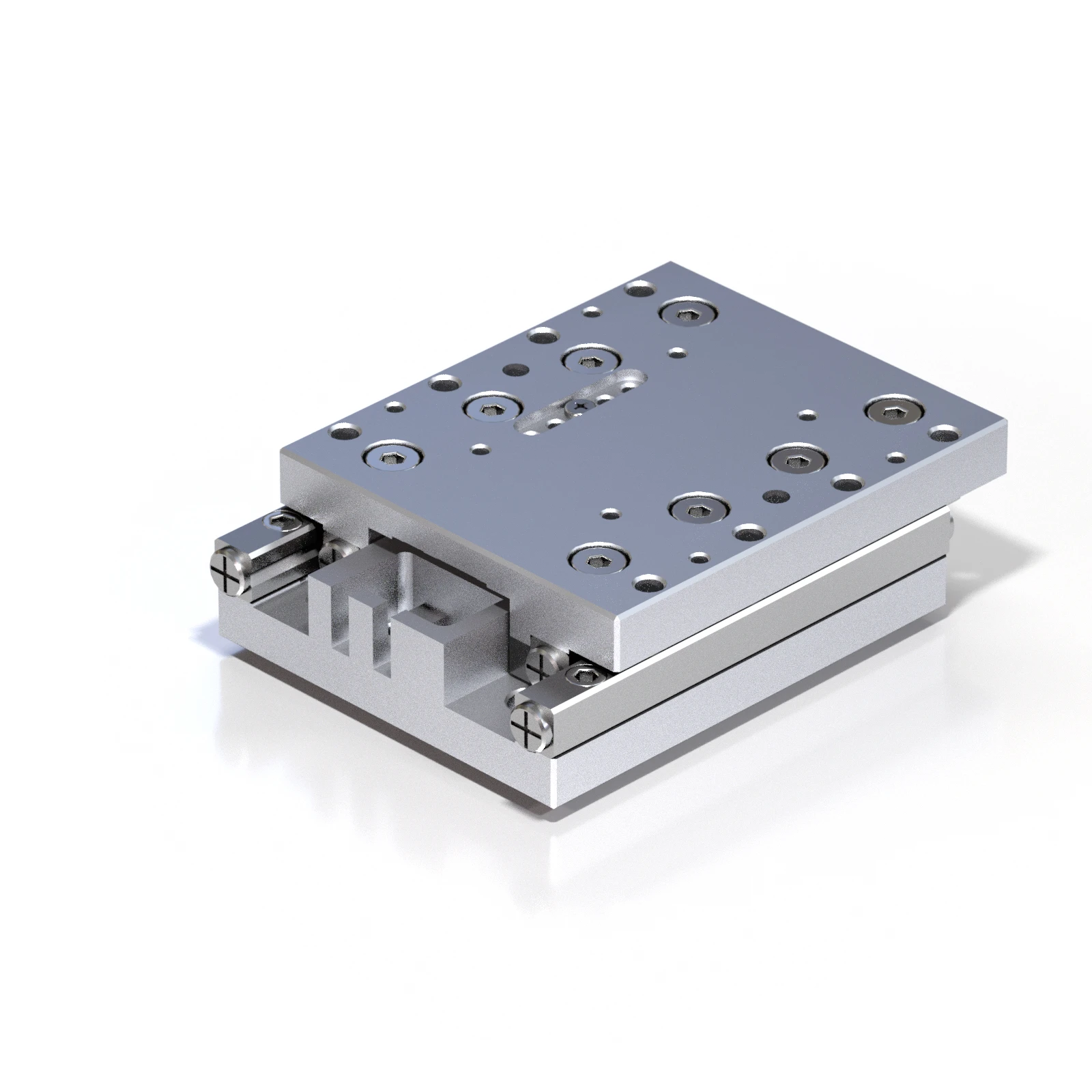
画像: PI NEXACTウォーキングモーターアセンブリ。順番にクランプおよびプッシュする協調型圧電アクチュエータレッグを示す。出典: Physik Instrumente (PI)
動作原理の詳細
典型的なウォーキングモーターは、ペアで配置された2~3組の圧電アクチュエータを持っています。各セットには、クランプアクチュエータ(横方向に膨張してドライブロッドまたはレールを把持する)とプッシュアクチュエータ(縦方向に伸長してクランプされたセクションを前進させる)が含まれます。サイクルは以下の通りです。
- グループAがレールをクランプ。
- グループAのプッシュアクチュエータが伸長し、レールを1ステップ(通常0.1~10 um)前進。
- グループBがレールをクランプ。
- グループAがリリース。
- グループAのプッシュアクチュエータが後退。
- グループAが再びクランプ。
- 繰り返し。
3グループが120度ずれて動作すると、運動は準連続的になります。少なくとも1グループが常にクランプおよびプッシュしているため、レールは正味の摺動摩擦を受けません。これは、摩擦摺動が運動メカニズムである定在波やスティックスリップモーターとは根本的に異なります。
代表的な製品
PI NEXLINEシリーズ。 PIのNEXLINEは、市販されている中で最高力の圧電モーターです。N-216 NEXLINEアクチュエータは、最大600 Nのプッシュ力を最大1 mm/sの速度で発生し、サブナノメートルの分解能を持ちます。ストロークは無制限(ガイドレールまたはロッドの長さのみに制限)です。NEXLINEは、シアモード圧電アクチュエータをクランプ機能に、縦モードアクチュエータをプッシュ機能に使用する3グループウォーキング機構を採用しています。N-216は、ナノメートル精度で極端な力を必要とする用途向けに設計されています。重力波検出器のミラー位置決め、望遠鏡の大型光学素子のアライメント、計測用の重荷重ナノポジショニングなどです。
PI NEXACTシリーズ。 NEXACT(N-664)は、高速粗位置決め用のPILine共振駆動と、精密ナノポジショニング用のPiezoWalk機構を単一ステージに組み合わせたコンパクトなウォーキングモーターです。NEXACTはPiezoWalkモードで0.03 nmの分解能、PILineモードで200 mm/sの速度、10 Nの力を達成します。ストローク範囲は7.5~51 mmです。このデュアルモードアーキテクチャは、速度と分解能の根本的なトレードオフに対処します。共振モードで素早く接近し、最終的なナノメートル位置決めにはウォーキングモードに切り替えます。
PI PiezoWalk NEXLINEおよびN-331シリーズ。 N-331 PiezoWalkは、4本の圧電アクチュエータレッグを2ペアに配置し、セラミック摩擦プレートをウォーキングさせます。最大10 Nの力、10 mm/sの速度、0.03 nmの分解能を提供します。ストロークは10~20 mmです。半導体計測、走査プローブ機器、干渉計アライメント用のナノポジショニングステージに最適化されています。
PiezoMotor LEGS(現Acuvi)。 PiezoMotor(スウェーデン、Acuviにリブランド)のLEGSモーターは、セラミックドライブロッドを交互に把持してプッシュするペアのバイモルフ曲げアクチュエータ(「レッグ」)を使用します。各レッグは円弧状に曲がり、ロッドに接触してプッシュし、もう一方のレッグが引き継ぐ際に持ち上がります。LL06 LEGSモーターは6 Nの力、最大15 mm/sの速度、0.5 nmまでのステップサイズを生成します。フォームファクターはコンパクト(モーター素子で28 x 14 x 10 mm)で、駆動回路はマルチグループウォーキングモーターと比較して比較的シンプルです。LEGSモーターは宇宙計器、ポータブル分光器、医療機器に使用されています。
力の優位性
ウォーキングモーターは、すべての圧電モーター技術の中で最大の力を発生します。NEXLINEの600 Nは、定在波モーターの230 Nやスティックスリップ駆動の0.35 Nを大きく上回ります。この力の優位性はクランプ機構に由来します。圧電アクチュエータは高い法線力(クランプアクチュエータのd33またはd15モード膨張によって生成)でレールを把持し、プッシュ力はクランプ力に摩擦係数を掛けたものに制限され、振動チップの間欠的な接触には制限されません。
トレードオフは速度です。ウォーキングモーターは遅いです。ステッピングサイクルには時間がかかります。各クランプ・伸長・リリース・後退シーケンスにはステップごとに46回の電子スイッチングイベントが必要で、圧電アクチュエータは各サイクル内で完全に伸縮する必要があります。典型的な速度は0.0115 mm/sです。PI NEXLINEは荷重下で約1 mm/sが上限です。重い荷重のナノメートル位置決め(光学テーブル、望遠鏡ミラー、工作機械スライド)が必要な用途では、この速度で十分です。迅速な再位置決めが必要な用途には不向きです。
サブナノメートル分解能
ウォーキングモーターの分解能は、主にプッシュアクチュエータのひずみ分解能と閉ループフィードバックの品質によって制限されます。各ステップは確定的な圧電膨張(確率的な摩擦イベントではない)によって生成されるため、ステップサイズの制御性が高くなります。静電容量位置センサーと閉ループサーボ制御により、ウォーキングモーターは日常的に0.1 nm以下の位置決め分解能を達成します。これにより、一部の構成ではフレキシャーガイド付き圧電スタックステージを超える、利用可能な最高分解能の巨視的位置決め技術となっています。
圧電スタックアクチュエータ
圧電スタックアクチュエータは、最も基本的な圧電モーションデバイスです。厚み方向に分極された薄い圧電セラミック層を、電極を挟んで積層したものです。電圧を印加すると、各層がd33モード(分極方向)で膨張します。個々の層の膨張が累積し、層数×電圧×d33係数に比例した合計ストロークが得られます。
これは最もシンプルな圧電モーション技術です。摩擦インターフェースも、共振も、ステッピング機構もありません。セラミックが直接変形します。その結果、圧電ファミリーの中で最も応答が速く、最も力が強く、最も分解能が高いアクチュエータとなりますが、ストロークが著しく制限されます。
動作特性
圧電スタックの伸長は近似的に以下の式で表されます。
delta_L = n * d33 * V
ここでnは層数、d33は圧電電荷係数(PZT-5Hでは通常300600 pm/V)、Vは印加電圧です。100層の100 um厚の層を持つ10 mm長のスタックを150 Vで駆動すると、ストロークは約100 * 500e-12 * 150 = 7.5 umになります。実際には、市販のスタックは0.1%150 umのストロークを生成します。0.15%のひずみを達成するため、10 mmスタックは1015 umのストローク、100 mmスタックは100
圧電効果の記事では、d33係数とその材料依存性について詳しく解説しています。
力の能力
圧電スタックは非常に大きな力を発生します。ブロッキング力(ゼロ変位時の最大力)は以下の式で表されます。
F_block = k * delta_L_max
ここでkはスタック剛性です。典型的な10 x 10 x 18 mmのスタックは約200 N/umの剛性と15 umのフリーストロークを持ち、ブロッキング力は3,000 Nになります。より大きなスタックではさらに高くなります。PI P-025 PICAスタック(直径25 mm、長さ36 mm)は最大30 kNのブロッキング力を生成します。最大の市販スタック(PI P-056シリーズ、直径75 mm)は最大70 kNを生成します。
これらの力は、他のすべての圧電技術を圧倒します。ウォーキングモーターは600 N、定在波モーターは30 Nに達します。油圧および電磁システムのみが、生の力出力で圧電スタックに匹敵します。
応答時間
機械的ドライブトレイン、摩擦インターフェース、共振の立ち上がりがないため、圧電スタックアクチュエータはマイクロ秒のタイムスケールで応答します。電気的時定数はRC(スタックの静電容量×ドライバーの出力インピーダンス)であり、通常1100 usです。機械的時定数はスタックの一次共振周波数で決まり、50 mm以下のスタックでは通常10100 kHzです。50 kHzの共振を持つ20 mmのスタックは、約10 usでフルストロークステップを完了できます。
これにより、圧電スタックは利用可能な最速のマクロスケールアクチュエータとなっています。同等の力レベルでこの応答速度に近い電磁アクチュエータは存在しません。
代表的な製品

画像: PI PICAスタックアクチュエータコレクション。小型5 mmチップから大型25 mmパワーアクチュエータまでのフォームファクター範囲を示す。出典: Physik Instrumente (PI)
PI PICAおよびPICMAシリーズ。 PIは最も広範な市販圧電スタックを製造しています。P-885 PICMA(積層型、5 x 5 x 9 mm)は9.1 umのストローク、1,750 Nのブロッキング力、142 kHzの共振周波数を提供します。P-025 PICAパワーアクチュエータ(直径25 mm、長さ36 mm)は38 umのストロークと30 kNのブロッキング力を提供します。動作電圧は積層型で0120 V、高電圧型で01,000 Vです。電圧とストロークを低減した条件での寿命は10^10サイクル(数百億回)を超え、摩擦ベースのモーターを大きく上回ります。

画像: PI PICMA積層スタックアクチュエータ(各種サイズ)。セラミック層構造が見える。出典: Physik Instrumente (PI)
Noliac (CTS) NACシリーズ。 Noliac(現在はCTS Corporationの一部)は、2 x 2 x 2 mm~10 x 10 x 56 mmの標準サイズでOEM圧電スタックを供給しています。NAC2015-H12は200 Vで12 umのストローク、4,600 Nのブロッキング力を生成します。これらはフレキシャーナノポジショニングステージ内の力発生素子として広く使用されています。
Thorlabs PKおよびPAシリーズ。 Thorlabsは、光学およびフォトニクス用途向けの積層型圧電スタックを提供しています。PK4CMP2(5 x 5 x 10 mm)は150 Vで11.2 umのストロークを提供します。PA4HKWは1,000 Vで19.8 umを生成する高電圧スタックです。
TDKおよびTokin。 日本のメーカーは、自動車(数十億個が展開されている燃料インジェクター)および産業用途向けに大量の積層型圧電スタックを供給しています。
モーションにおけるスタックの位置づけ
圧電スタックはモーターではありません。無制限のストロークは提供しません。ストロークは本質的にその長さの0.1%0.15%に制限されます。10 mmスタックで1015 um、100 mmスタックで100~150 umです。約200 um以上のストロークが必要な用途では、スタックは機械的増幅(次のセクション)と組み合わせるか、モーター機構(ウォーキングモーター、スティックスリップ駆動)内の駆動素子として使用するか、フレキシャーステージとペアにして小さな変位を有用な位置決めに変換する必要があります。
圧電スタックの大半は、フレキシャーガイド付きナノポジショニングステージ内に展開されており、フレキシャー機構がガイドし、閉ループ制御システムが精度を高める力と変位を提供します。PIのP-6xxナノポジショニングステージ、nPointのNPXYシリーズ、Mad City LabsのNano-PDQシリーズはすべて、内部アクチュエータとして圧電スタックを使用しています。これらのステージは、1300 umのストロークをサブナノメートルの分解能と110 kHzの帯域幅で提供し、走査プローブ顕微鏡、半導体リソグラフィ、精密光学アライメントの基盤として機能しています。
増幅型圧電アクチュエータ
増幅型圧電アクチュエータは、圧電スタックの根本的な制限(微小なストローク)に対処するため、機械的増幅構造を使用してスタックの変位を520倍に増幅します。その結果、0.12 mmのストロークを持つ自己完結型アクチュエータとなり、スタックの力と速度の多くを保持しますが、両方とも増幅比に応じて低下します。
Cedrat APA
Cedrat Technologies(フランス)は、増幅型圧電アクチュエータ(APA)という製品カテゴリを確立しました。APAは、楕円形の金属シェル内に圧電スタックを収めた構造です。スタックが膨張すると、シェルの短軸が伸長し、体積保存により長軸が収縮します。その正味の効果は、長軸方向のシェル両端での出力が、スタックの膨張に対して増幅された変位で移動することです。
増幅率はシェルの形状に依存します。より薄く、より偏心した楕円はより多く増幅しますが、剛性と力がそれに比例して低下します。典型的な倍率は5~20倍です。
画像: Cedrat APA300ML増幅型圧電アクチュエータ。内部スタックの変位を増幅する楕円シェルの特徴的な形状。出典: Cedrat Technologies
Cedrat APA120ML。 スタック電圧: 0~150 V。フリーストローク: 126 um(約15 umのスタック膨張から増幅、約8倍)。ブロッキング力: 38 N。剛性: 0.3 N/um。共振周波数: 1,460 Hz。振動制御、能動光学、適応構造のコンパクトな主力製品です。
Cedrat APA400M。 フリーストローク: 400 um。ブロッキング力: 92 N。共振周波数: 710 Hz。宇宙メカニズム、能動減衰システム、精密工具駆動に使用されています。
Cedrat APA1000XL。 フリーストローク: 1,010 um(1 mm超)。ブロッキング力: 36 N。共振周波数: 230 Hz。圧電アクチュエータの確定的応答特性を保持しつつ、小型リニアモーターのストローク領域に近づきます。
内蔵型プリロード
楕円シェル設計の重要な特徴は、圧電スタックに圧縮プリロードをかけることです。PZTセラミックスは圧縮には強く(100+ MPaに耐える)、引張には弱い(5~10 MPaで破壊)です。むき出しのスタックでは、急速な減速や外部引張荷重がセラミックを割る可能性があります。APAのシェルは、出力が伸長方向に引かれた場合でも、常にスタックを圧縮状態に保ちます。これにより、APAは動的用途において裸のスタックよりも機械的に堅牢になります。
用途
増幅型圧電アクチュエータは、スタックアクチュエータ(高力、微小ストローク)とモーター駆動ステージ(無制限ストローク、低分解能)の間のニッチを埋めます。以下のような用途に使用されています。
- 能動振動制御。 構造経路に設置して振動を打ち消します。1~2 kHzの共振周波数は、感度の高い計器の除振に必要な制御帯域幅と合致します。
- 宇宙メカニズム。 Cedrat APAは複数のESAおよびCNESミッションに搭載されています。潤滑剤やベアリングを使用しないソリッドステート構造は、宇宙の真空と温度サイクルに適しています。
- 補償光学。 10~100 umのストロークとサブマイクロメートルの精度を必要とする可変形ミラーアクチュエータ。
- バルブ駆動。 高速応答(ミリ秒)と中程度のストロークを必要とする空圧・油圧システムの比例バルブ制御。
- 超音波工具駆動。 超音波支援切削のための加工工具に重畳される高周波振動。
その他の増幅型圧電アクチュエータのメーカーには、Noliac/CTS(自社ブランドで増幅アクチュエータを製造)、Thorlabs(AEシリーズの増幅アクチュエータ)、米国のDynamic Structures & Materials(DSM、航空宇宙用途向けのカスタム増幅アクチュエータを製造)があります。
シア、ベンディング、チューブアクチュエータ
いくつかの圧電アクチュエータ技術は、コンポーネントレベルのデバイスとして動作し、通常は完全なモーターアセンブリとして販売されるのではなく、より大きな位置決めシステムに組み込まれます。これらは走査プローブ顕微鏡、マイクロオプティクスアライメント、精密計器設計の主力です。
シアモードアクチュエータ(d15)
シアモードで動作する圧電セラミックスは、分極方向に対して垂直に電場が印加されると横方向に変位します。d15係数はソフトPZT材料では通常d33の23倍(PZT-5Hではd15が約700800 pm/V、d33が約500~600 pm/V)であるため、シアモードは与えられた電圧からの変位を最大化するのに有効です。
シアアクチュエータは、d31モードベンダーを悩ませるティルティングアーティファクトなしに面内運動を生成します。200 Vで駆動される単一のシアプレートは1~5 umの横方向変位を生成できます。ウォーキングモーター内(PI NEXLINEはクランプ機能にシアモードアクチュエータを使用)、ナノポジショナーステージ、マイクロオプティクスアライメントデバイスに使用されています。
商業的には、PIがシアプレート(P-141P-143シリーズ)を250 Vで最大10 umのストロークで製造しています。Noliacは OEM統合用のカスタムシア素子を供給しています。主な制限は、d33スタックアクチュエータと比較した力出力の低さ(10100 N)と、複数のシアプレートを積層せずに大きなストロークを達成することの困難さです。
バイモルフベンダー
バイモルフベンダーは、反対の分極方向を持つ2つの圧電層を接合したもの(または1つの圧電層と受動的な金属シムを接合したもの)です。電圧が印加されると、一方の層が膨張し他方が収縮(または固定のまま)するため、アセンブリが曲がります。これにより、セラミックの小さな面内ひずみがはるかに大きな先端たわみに変換されますが、力は低下します。
長さ30 mm、厚さ1 mmの典型的なバイモルフベンダーは、200 Vで0.51 mmの先端たわみを0.10.5 Nの力で生成します。たわみ対長さの比率はスタックアクチュエータのひずみよりもはるかに大きいため、ベンダーはコンパクトな形状で中程度の変位を必要とする用途に有用です。
用途には、テキスタイルバルブ(小さな力での高速切り替え)、点字ディスプレイ(ドットの上げ下げを行うバイモルフアクチュエータのアレイ)、マイクロミラーチルトアクチュエータ、環境振動からのエネルギーハーベスティングがあります。モーション技術の文脈では、ベンダーはいくつかのコンパクトな圧電モーター設計の駆動素子として使用されています。例えば、PiezoMotor LEGSモーターは「ウォーキングレッグ」としてバイモルフ曲げアクチュエータを使用しています。
チューブスキャナー

画像: 各種サイズのPZT圧電スキャナーチューブをユーロコインと並べて表示。これらの中空セラミックシリンダーはSPM用の3軸走査運動を提供する。出典: Physik Instrumente (PI)
圧電チューブスキャナーは、4つの外部電極(象限)と1つの内部電極を持つ中空の薄壁PZTシリンダーです。対向する象限ペアに差動電圧を印加するとチューブがXおよびY方向に曲がり、4象限すべてへの共通モード電圧はZ変位(伸長または収縮)を生成します。したがって、単一のチューブが最小のパッケージで3軸走査運動を提供します。
チューブスキャナーは、走査トンネル顕微鏡(STM)および原子間力顕微鏡(AFM)の標準アクチュエータです。典型的なチューブスキャナー(外径12.7 mm、長さ50 mm、壁厚0.5 mm)は、200 Vで50100 umのXY走査範囲と510 umのZ範囲を提供します。分解能はサブオングストロームであり、SPMで日常的に達成される原子分解能イメージングがそれを実証しています。
チューブスキャナーの限界はよく知られています。X、Y、Z軸間の顕著なクロスカップリング、10%~15%のヒステリシス(開ループで動作するすべての圧電アクチュエータに共通)、数分間にわたる1%10%のクリープ、そしてチューブの低い共振周波数(通常110 kHz)による走査速度の制限です。高速または広範囲の走査では、スタックアクチュエータを用いたフレキシャーステージが研究機器でチューブスキャナーに取って代わりつつありますが、商業SPMではシンプルさと低コストのためチューブが依然として主流です。
技術間の比較
すべての主要な圧電モーション技術を説明したので、定量的に比較することが可能です。以下の分析では、技術選択を決定する主要な性能パラメータについて解説します。
速度
摩擦駆動型圧電モーターの中では、定在波超音波モーターが速度で首位に立ち、最速の設計(PI PILine U-264)は400 mm/sに達します。進行波回転モーターは100150 RPMを達成し、直径60 mmのモーターでは接触面の接線速度で3050 mm/sに相当します。スティックスリップ駆動はそれより遅く、通常120 mm/sで、最良の設計(SmarAct SLC-17シリーズ)で20 mm/sに達します。ウォーキングモーターは最も遅い摩擦ベースの技術で、最大115 mm/sです。圧電スタックアクチュエータは連続速度を生成しません。マイクロ秒単位で単一ストロークを実行し、1 m/sを超える過渡速度に対応しますが、マイクロメートルスケールの距離に限られます。
力
圧電スタックが力出力で圧倒的に優位であり、大型スタックで70 kNに達します。次いでウォーキングモーターで、PI NEXLINEは600 Nを生成します。定在波モーターは構成に応じて0.530 N(単一素子から連結HR8まで)を生成します。進行波モーターは0.12 Nmのトルクを生成します。スティックスリップ駆動は0.3~5 Nですが、MKS Picomotorはそのスクリュー機構により22 Nに達します。
分解能
モーター技術の中では、ウォーキングモーターが最も微細な分解能を達成します。静電容量フィードバックで0.03 nm以下(PI NEXACT)です。定在波モーターは適切なエンコーダーで1 nm以下に達します。スティックスリップ駆動は統合型ナノメトリックセンサー(SmarAct SCL)で1 nm以上の閉ループ精度を達成します。フレキシャーステージ内の圧電スタックは原理的にサブオングストロームの分解能を達成しますが、電子機器ノイズとセンサーノイズが制限要因となります。進行波モーターはこのグループの中で最も粗い分解能を持ち、通常0.5~5 umで、接触ダイナミクスと回転構成での高分解能エンコーダーの実装の困難さによって制限されます。
ストロークとストローク長
スティックスリップおよび定在波モーターは無制限のストローク(ガイドレールの長さのみに制限)を提供し、300+ mmまでの市販ステージが利用可能です。進行波モーターは無制限の回転ストロークを提供します。ウォーキングモーターも無制限のストロークを提供します。圧電スタックは5200 umに制限されます。増幅型圧電アクチュエータはこれを0.12 mmに拡張します。チューブスキャナーは50~100 umのXY範囲を提供します。
自己保持
すべての摩擦ベースの圧電モーター(定在波、進行波、スティックスリップ、ウォーキング)は、電源をオフにすると自己保持します。摩擦プリロードが電流ゼロで荷重を保持します。圧電スタックは自己保持しません。電圧を除去すると非通電長さに戻ります(ヒステリシスにより復帰位置は開始位置とわずかに異なります)。増幅アクチュエータもこの非保持特性を継承します。
摩耗と寿命
圧電スタックは最も長い寿命を持ちます。減格電圧での10^10+サイクル以上で、ほとんどの用途では実質的に無限です。ウォーキングモーターはプッシュ相で摺動摩擦がないため摩耗が少なく、クランプアクチュエータは相対運動なしに把持とリリースを行います。寿命データは限られていますが、PIは測定可能な劣化なしで数百万サイクルを報告しています。定在波モーターは摩擦インターフェースで摩耗し、典型的な寿命は5,000~20,000時間のアクティブ動作です。進行波モーターも同様の摩耗特性を持ちます。スティックスリップモーターは摩擦インターフェースで摩耗し、同等のデューティサイクルでは定在波タイプに匹敵する寿命です。
環境適合性
スティックスリップ駆動は最も広い環境動作範囲を提供します。極低温(10 mK300 K)、超高真空(10^-11 mbar)、強磁場(31 T+)、放射線環境に対応します。定在波モーターは真空(適切な材料で10^-610^-8 mbar)と中程度の温度範囲(通常-2080℃)で動作します。ウォーキングモーターは良好な真空適合性(PI NEXLINEおよびNEXACTは10^-6 mbarまでの真空バリアントが利用可能)を持ち、-4080℃で動作します。進行波モーターは最も環境制限が大きく、標準的には常温常圧のみでの動作で、真空および極低温バリアントは稀です。圧電スタック自体は真空および温度に適合しており、主にワイヤー絶縁と接着層によって制限されます(通常-40~150℃)。
複雑さとコスト
スティックスリップ駆動は実装が最もシンプルです。単一の圧電アクチュエータ、のこぎり波発生器、摩擦ガイドで構成されます。駆動回路は信号発生器とアンプのような単純なもので済みます。MKS Picomotorのドライバーは、チャネルあたり約$1,500のスタンドアロンボックスです。完全なSmarActポジショナーは、センサーオプションに応じて軸あたり$2,000~$5,000です。
定在波モーターは、周波数追従(PLLまたはアドミタンス制御)を備えた精密駆動回路と、通常は位置決め用の閉ループエンコーダーフィードバックが必要です。完全なPILineステージは軸あたり$3,000~$8,000です。Nanomotion Edgeモジュールはモーター素子あたり$500~$1,500に、ドライバーとステージが加わります。
ウォーキングモーターは最も複雑な駆動回路(精密タイミングを備えた多相波形生成)を持ち、高分解能エンコーダーが必要です。完全なPI NEXLINEステージは軸あたり$5,000~$15,000です。NEXACTデュアルモードステージは$8,000~$12,000です。
進行波モーターは周波数追従付き二相駆動回路が必要です。Shinseiモーターはモーターあたり$200~$800に、ドライバーが加わります。完全な回転ステージは$2,000~$5,000です。
圧電スタックは安価(セラミックで$20~$500)ですが、高電圧アンプ($500~$3,000)が必要であり、精密用途ではフレキシャーステージ($2,000~$15,000)と静電容量位置センサー($2,000~$5,000)も必要です。
技術横断比較
| パラメータ | 定在波 | 進行波 | スティックスリップ | ウォーキング | 圧電スタック | 増幅型 |
|---|---|---|---|---|---|---|
| 最大速度 | 400 mm/s | 50 mm/s | 20 mm/s | 15 mm/s | N/A | N/A |
| 最大推力 | 30 N | 2 Nm | 22 N | 600 N | 70 kN | 200 N |
| 分解能 | < 1 nm | 0.5 um | < 1 nm | 0.03 nm | < 0.1 nm | 1 nm |
| ストローク | 無制限 | 無制限 | 無制限 | 無制限 | 5-200 um | 50-2000 um |
| 自己ロック | あり | あり | あり | あり | なし | なし |
| 真空 | HV | 大気圧 | UHV | HV | UHV | HV |
| 極低温 | なし | なし | 10 mK | -40 C | -40 C | -40 C |
| 電子回路 | 普通 | 複雑 | シンプル | 複雑 | シンプル | シンプル |
| 軸あたりコスト | $3-8k | $2-5k | $2-5k | $5-15k | $5-20k | $0.5-3k |
総合比較表
| パラメータ | 定在波 | 進行波 | スティックスリップ | ウォーキング | 圧電スタック | 増幅型圧電 |
|---|---|---|---|---|---|---|
| 速度 | 1~400 mm/s | 30~50 mm/s(接線方向) | 0.5~20 mm/s | 0.01~15 mm/s | N/A(単一ストローク) | N/A(単一ストローク) |
| 力 | 0.5~30 N | 0.1~2 Nmトルク | 0.3~22 N | 10~600 N | 1,000~70,000 N | 10~200 N |
| 分解能(閉ループ) | < 1 nm | 0.5~5 um | < 1 nm | < 0.03 nm | < 0.1 nm | 1~50 nm |
| ストローク/移動距離 | 無制限(レール長) | 無制限(回転) | 無制限(レール長) | 無制限(レール長) | 5~200 um | 50~2,000 um |
| 自己保持 | あり | あり | あり | あり | なし | なし |
| 典型的な寿命 | 5,000~20,000時間 | 5,000~15,000時間 | 5,000~20,000時間 | > 10,000時間(推定) | > 10^10サイクル | > 10^9サイクル |
| 真空(mbar) | 10^-6~10^-8 | 常圧のみ(通常) | 10^-9~10^-11 | 10^-6 | 10^-9 | 10^-6~10^-8 |
| 温度範囲 | -20~80℃ | 5~50℃(通常) | 0.01~300 K | -40~80℃ | -40~150℃ | -40~80℃ |
| 磁場感度 | なし | なし | なし | なし | なし | なし |
| 駆動回路 | PLL/アドミタンス追従 | 二相 + PLL | のこぎり波発生器 | 多相タイミング | 高電圧アンプ | 高電圧アンプ |
| ドライバー複雑度 | 中 | 中~高 | 低 | 高 | 低(アナログ) | 低(アナログ) |
| 典型的なステージコスト | $3,000~$8,000 | $2,000~$5,000 | $2,000~$5,000 | $5,000~$15,000 | $5,000~$20,000(ステージ込み) | $500~$3,000 |
| 運動タイプ | リニア(主) | 回転(主) | リニア、回転 | リニア | リニア | リニア |
適切な技術の選定
上記の比較表には多数のデータポイントが含まれていますが、特定の用途に対する技術選択は、通常3~4つのパラメータに集約されます。以下のフレームワークは選定プロセスを順に解説します。
まず速度とストロークから始める
50 mm/s以上の持続速度かつ10 mm以上のストロークが必要な場合、候補は定在波超音波モーターと進行波モーター(回転用)に限られます。スティックスリップおよびウォーキングモーターはこの領域では速度が不十分です。
1 mm/s未満の速度かつ200 um未満のストロークが必要な場合、フレキシャーステージ内の圧電スタックアクチュエータが最良の選択です。セラミックの直接ひずみが最高の分解能、最速の応答、最長の寿命を提供します。
20 mm/s未満の速度で5 mm以上のストロークが必要な場合、4つのモータータイプすべて(定在波、スティックスリップ、ウォーキング、回転用進行波)が候補となり、力、分解能、環境で選択を絞り込みます。
次に力でフィルタリング
50 Nを超える連続力が必要な場合、ウォーキングモーター(NEXLINEクラス)と圧電スタック(アクチュエータとして、モーターとしてではなく)のみが残ります。他の圧電技術ではこの力レベルは提供できません。
力の要件が5 N未満の場合、すべてのモータータイプが実行可能であり、力は判別基準になりません。
次に分解能でフィルタリング
5 nm未満の分解能が必要な場合、ウォーキングモーターと圧電スタックステージが自然な選択です。定在波モーターもプレミアムエンコーダーでこの領域に到達できますが、本来そのために設計されたものではありません。スティックスリップ駆動も統合型ナノメトリックセンサー(SmarAct SCL)で達成できます。
0.1 nm未満の分解能が必要な場合、候補はウォーキングモーター(NEXACT、微動モードのNEXLINE)と静電容量センサー付き圧電スタックフレキシャーステージに絞られます。商業的に入手可能な他のものでこれは実現できません。
分解能要件が中程度(100 nm~5 um)の場合、すべての技術が適格であり、環境とコストで選択が決まります。
次に環境でフィルタリング
これがしばしば決定的な基準となります。極低温動作(-40℃以下)が必要な場合、スティックスリップ駆動のみが実用的です。超高真空(10^-8 mbar以下)が必要な場合、スティックスリップ駆動が第一選択であり、次いで圧電スタックです。強磁場中での動作が必要な場合、圧電ベースの技術(すべてのタイプ)のみが適格であり、電磁コンポーネントを組み込んだハイブリッド設計は排除されます。
標準的な実験室または産業環境(常温、大気圧または中程度の真空)では、環境は判別要因になりません。
最後にコストと複雑さを検討
予算に制約のあるプロジェクトでは、スティックスリップ駆動(MKS Picomotor、Thorlabs PIA)がドライバーを含めて軸あたり$500~$2,000で最も低いエントリーポイントを提供します。統合ステージの定在波モーター(Xeryon、Thorlabs Elliptec)は$2,000~$4,000で競争力があります。ウォーキングモーターは$5,000~$15,000のプレミアムがかかりますが、力や分解能の優位性が必要な場合にのみ正当化されます。
各技術が最適な場面
定在波超音波モーターは、中程度の速度(10400 mm/s)、中程度の力(110 N)、コンパクトなサイズ、自己保持、エンコーダーレベルの分解能(1~100 nm)を必要とする用途に最適です。半導体検査ステージ、フォトニクスアライメント、医療機器の位置決めが最適な適用領域です。製品: PI PILine、Nanomotion Edge、Xeryon XLS。
進行波モーターは、コンパクトなリング形状で滑らかで静音な自己保持回転運動が必要な場合に最適です。カメラオートフォーカス、ターレット回転、ジンバルポインティングが主要な用途です。精密リニアポジショニングには最適な選択とは言えません。製品: Shinsei USR、Canon USM。
スティックスリップ(慣性)駆動は、極端環境での動作(極低温、超高真空、強磁場)が必要な場合、またはシンプルさ、コンパクトさ、コストが最優先の場合に最適です。希釈冷凍機内、極低温STM、超伝導マグネットボア内での位置決めに実用的な唯一の技術です。製品: SmarAct SLC、attocube ANP、MKS Picomotor。
ウォーキングモーターは、極端な力(10~600 N)、サブナノメートルの分解能、長いストロークの組み合わせが必要な場合に最適です。重力波検出器の光学系、望遠鏡ミラーのアライメント、重荷重計測ステージ、ナノリソグラフィプラットフォームが、コストと複雑さを正当化する用途です。製品: PI NEXLINE、PI NEXACT、Acuvi LEGS。
圧電スタックアクチュエータは、最速の応答(マイクロ秒)、最大の力(kN範囲)、最高の分解能(サブオングストローム)が必要で、ストローク予算が200 um未満の場合に最適です。事実上すべてのナノポジショニングステージ内のエンジンであり、高速走査、能動振動制御、可変形光学のアクチュエータとして選ばれます。製品: PI PICMA/PICA、Noliac NAC、Thorlabs PK。
増幅型圧電アクチュエータは、0.1~2 mmのストロークが確定的でヒステリシス補償可能な応答で必要であり、摩擦摩耗がなく、モーターベースのストロークが不要な用途に最適です。宇宙メカニズム、能動減衰、比例バルブ制御、補償光学が主な領域です。製品: Cedrat APA、Thorlabs AE。
ハイブリッドアプローチに関する注記
最も高性能な精密位置決めシステムは、しばしば技術を組み合わせます。粗動/微動アーキテクチャでは、高速粗動(200 mm/sで100 mmのストローク)に定在波モーターを使用し、微動位置決め(サブナノメートル分解能で50 umの範囲)に圧電スタックステージを使用することがあります。PI NEXACTはこれを明示的に実装しており、PILine共振モーターとPiezoWalk機構を単一のステージに組み合わせています。SmarActのSLCポジショナーは、SPM用途向けに圧電スキャナーステージと組み合わせることができます。
上記の選定フレームワークは主要な位置決め技術を特定しますが、システムアーキテクトは、主要技術では対応できない要件に二次技術で対処できるかどうかを常に検討すべきです。多くの高性能システムでは、その答えは「はい」です。
適切な圧電モーション技術の選定は、根本的に物理と要件のマッチングです。各技術は異なる物理メカニズムを利用しており、各メカニズムには工学的にいくら努力しても克服できない固有の強みと限界があります。上記のフレームワークは、どの物理がどの要件に一致するかを示します。要件を正確に定義し、フィルターを順番に適用すれば、技術の選択は明確に浮かび上がります。選択が曖昧な場合は、比較表が定量データに基づく判断を可能にします。