技術比較
技術選定フレームワーク: モータの選択を決定する5つの質問
圧電、サーボ、ステッパー、ボイスコイルアクチュエータの選定に具体的な閾値を用いた構造的な意思決定プロセス
技術選定フレームワーク: モータの選択を決定する5つの質問
精密モーションシステムのアクチュエータ技術評価に数か月を費やすエンジニアは少なくない。そのプロセスは通常カタログ検索から始まり、メーカーのデモを経て、技術的な優劣よりも営業担当者のフォローアップの熱心さに左右された判断で終わることが多い。結果として、動作はするが最適ではないシステムか、初週に特定すべきだった単一のパラメータで不合格になるシステムが選ばれることになる。
ほとんどのアクチュエータ選定は、5つの質問に順番に答えることで解決できる。各質問には候補を絞り込む具体的な数値閾値がある。3つ目の質問までに通常2つか3つの技術が完全に除外される。5つ目の質問までに、明確な勝者1つか、集中的なトレードスタディを要する2つの候補に絞られる。
このフレームワークは精密位置決めで最も一般的な6つのアーキテクチャをカバーする。リードスクリュー付きステッパーモータ、ボールねじ付きサーボモータ、ダイレクトドライブリニアモータ、超音波圧電モータ、ボイスコイルアクチュエータ、圧電スタック/フレクシャアクチュエータである。個別の比較については、圧電対サーボ、圧電対ステッパー、圧電対ボイスコイルを参照されたい。
 圧電モータステージのラインナップ。小型超音波リニアステージ、スティックスリップポジショナー、NEXACTウォーキングドライブステージ、ボイスコイルチップ・チルトプラットフォームなど。各フォームファクタが分解能・速度・力の設計空間の異なる領域を対象としている。出典: PI
圧電モータステージのラインナップ。小型超音波リニアステージ、スティックスリップポジショナー、NEXACTウォーキングドライブステージ、ボイスコイルチップ・チルトプラットフォームなど。各フォームファクタが分解能・速度・力の設計空間の異なる領域を対象としている。出典: PI
5つの質問
質問は弁別力の高い順に並べている。分解能は速度より多くの候補を排除し、速度は力より多くの候補を排除する。順番に答えること。
- 実際にどの分解能が必要か?
- どの速度とストロークが必要か?
- どの力が必要か?
- 動作環境はどのようなものか?
- デューティサイクルと熱バジェットは?
目的は最適化ではなく排除である。技術を採用する理由ではなく、除外する理由を探すのである。
技術比較マトリクス
| パラメータ | 圧電 | ステッピング | サーボ | ボイスコイル |
|---|---|---|---|---|
| 分解能 | 最良 | 良好 | 良好 | 良好 |
| 速度 | 良好 | 最良 | 最良 | 制限あり |
| 推力 | 制限あり | 良好 | 最良 | 良好 |
| 真空 | 最良 | 不良 | 普通 | 良好 |
| コスト | 高 | 低 | 中 | 中 |
| サイズ | 最良 | 大型 | 大型 | コンパクト |
質問1: 実際にどの分解能が必要か?
分解能、すなわち荷重下で双方向に確実に実行できる最小増分運動(MIM)は、最も強力な弁別因子である。この数値には正確かつ正直であるべきだ。プロセス公差が1マイクロメートルなのに10 nm分解能を指定すればコストと機械的リスクが増大する。逆に、実際には50 nmが必要なのに1マイクロメートルと指定すれば、後に苦痛を伴う改修が必要となる。
分解能はエンコーダ分解能ではない。ワークピース位置での最小の確実な位置変化であり、実際の動作荷重下で双方向に測定したものである。1 nmのエンコーダ読み値は、ボールねじに3マイクロメートルのバックラッシュがあれば何の意味もない。
分解能ティア1: 10マイクロメートル以上
すべての技術が使用可能。コスト面でステッパーモータがデフォルト。NEMA 17ステッパーにピッチ2 mmリードスクリューと1/16マイクロステッピングで約6マイクロメートルの理論ステップサイズとなり、摩擦と共振の影響を考慮すると10から20マイクロメートルの実用MIMとなる。軸あたりの総コストはモータ、ドライバ、機械部品で$50から$300。
製品例: Oriental Motor PKPシリーズ(0.9度ステップ、$80)、Thorlabs DRV014電動アクチュエータ(29 nmエンコーダ分解能、リードスクリュー使用で実用MIM ~10 um)、標準NEMA 17/23ステッパー+リードスクリュー。
推奨: ステッパーモータ。高速も必要ならサーボモータ。環境制約(質問4)で強制されない限り、このティアでは圧電を使用しない。
分解能ティア2: 1から10マイクロメートル
微細マイクロステッピングと精密リードスクリューを備えたステッパーはこの範囲に到達できるが、5マイクロメートル以下では低周波共振とマイクロステッピングのトルクプロファイルの非線形性により信頼性が低下する。ロータリーエンコーダ付きボールねじサーボモータはこの範囲全体で信頼性がある。リニアエンコーダ付きボイスコイルアクチュエータは短ストロークで良好に機能する。圧電モータは使用可能だが、このコスト水準では通常不要。
ステッパーシステムに閉ループエンコーダを追加するとこの範囲での信頼性が大幅に向上する。Trinamic TMC5160ドライバと外部エンコーダの組合せで、標準ステッパーとリードスクリューで2マイクロメートルの確実な位置決めを達成できる。
製品例: Newport ILS250CC(サーボ、100 nmエンコーダ分解能、250 mm可動域で実用MIM 0.5から1 um)、PI M-230(DCサーボ+ボールねじ、25 mmで50 nm分解能)、Thorlabs Z812B(ステッパー、29 nmエンコーダ分解能、12 mm可動域で実用MIM ~1 um)。
推奨: 50 mm以上のストロークにはボールねじサーボ。コスト優先なら閉ループエンコーダ付きステッパー。このティアは過剰設計しないこと。
分解能ティア3: 100ナノメートルから1マイクロメートル
ステッパーは除外される。機械的伝達誤差(リードスクリューのピッチ変動、バックラッシュ、共振による位置不確定性)がエンコーダの品質に関係なくこの分解能フロアを超えるためである。残る候補は、ダイレクトドライブリニアまたは外部リニアエンコーダ付きボールねじのサーボモータ、リニアエンコーダ付きボイスコイルアクチュエータ、圧電モータ。
ここからが技術選定の本番となる。精密ボールねじとリニアエンコーダ付きサーボは100 nm分解能を実現できるが、バックラッシュ管理、温度補正、高品質ガイドが必要。圧電モータは設計上バックラッシュのないよりシンプルなパッケージで同じ分解能を提供する。
製品例: PI U-521 PILine(超音波圧電、1 nmエンコーダ分解能、18 mm可動域で実用MIM ~50 nm、200 mm/s)、Aerotech ANT95-L(ダイレクトドライブサーボ、50から400 mmで100 nm分解能)、SmarAct SLC-2430(スティックスリップ圧電、31 mm可動域で1 nm閉ループ分解能)、Newport XMS160(リニアサーボ、100 nm MIM)。
推奨: 100 mm以下のストロークかつ50 mm/s以下の速度には圧電モータ。より長いストロークまたは高速にはダイレクトドライブリニアサーボ。定力要件で5 mm以下のストロークにはボイスコイル。
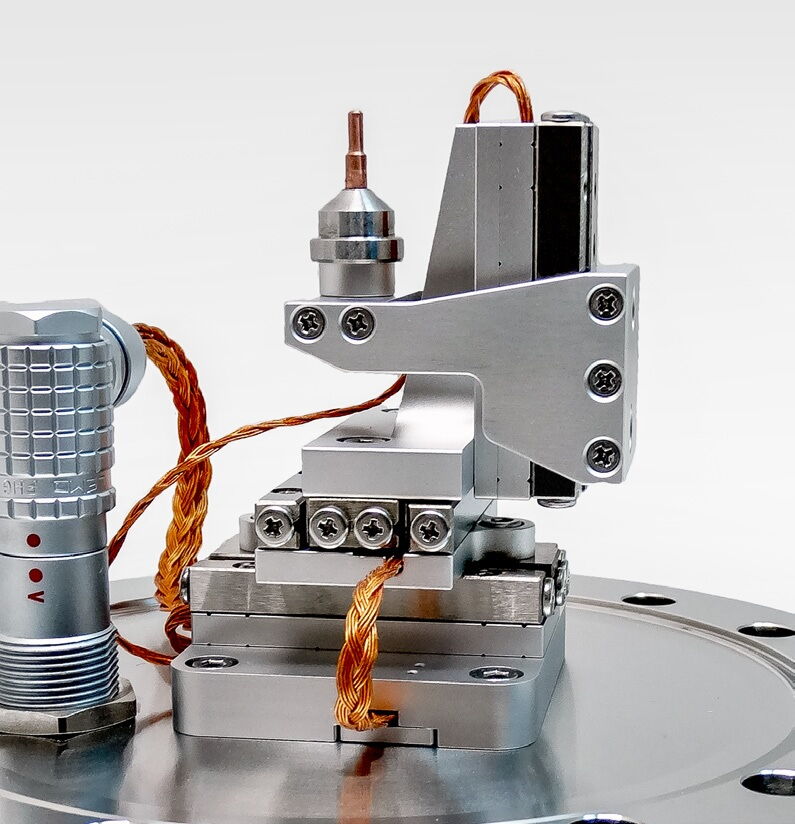
 PI N-565 NEXACT: 30 mm可動域でサブナノメートル分解能。このティアでは圧電モータがサーボリニアステージと直接競合するが、はるかにコンパクトでゼロ電力保持を実現。出典: PI
PI N-565 NEXACT: 30 mm可動域でサブナノメートル分解能。このティアでは圧電モータがサーボリニアステージと直接競合するが、はるかにコンパクトでゼロ電力保持を実現。出典: PI
分解能ティア4: 1から100ナノメートル
3つのアーキテクチャが残る。高分解能エンコーダ付き圧電モータ、静電容量式または干渉計式センサ付きフレクシャステージの圧電スタックアクチュエータ、約1 mm以下のストロークで静電容量フィードバック付きボイスコイルアクチュエータ。
ダイレクトドライブリニアサーボは長ストロークでこの範囲に到達可能だが、エアベアリング、干渉計フィードバック、除振花崗岩構造が必要。軸あたりのシステムコストは$50,000を超えることが多い。
このティアの圧電モータはサブナノメートル補間付きの光学式または静電容量式エンコーダを使用する。PI N-664 NEXACTは0.03 nmの開ループ分解能を達成。SmarAct SLC-1720は12 mm可動域で1 nm閉ループ分解能を提供。
製品例: PI N-664 NEXACT(0.03 nm開ループ分解能)、SmarAct SLC-1720(1 nm CL、12 mm可動域)、PI P-752 LISA(圧電フレクシャ、1 nm CL、25 umストローク)、Aerotech QNP-XY(圧電フレクシャ、0.15 nm分解能、100 umストローク)、H2W NCC02-15-020-1Xボイスコイル(静電容量フィードバックで100 nm以下、1 mmストローク)。
推奨: 1 mm以上の可動域には圧電モータ。500マイクロメートル以下の可動域で最高安定性には圧電フレクシャ。厳密な定力プロファイルでサブmmストロークのみボイスコイル。
分解能ティア5: 1ナノメートル以下
フレクシャステージ内の静電容量センサ付き圧電スタックアクチュエータ。サブナノメートル閉ループ位置決めの唯一の商用実現可能な解である。PI P-625 PIFOCは400マイクロメートル可動域で0.1 nm分解能を達成。Aerotech QNPシリーズは100マイクロメートル可動域で0.15 nm分解能を達成。
このレベルではすべてが重要となる。アンプノイズ、ケーブルシールド、ステージ材料の温度安定性、除振、さらには音響環境さえも。アクチュエータは最も容易な部分であることが多く、周辺システムが仕様達成の可否を決定する。
製品例: PI P-625.1CD(0.1 nm、400 um可動域)、Aerotech QNP-100Z(0.15 nm、100 um可動域)、PI P-363 PicoCube(0.1 nm、5 um可動域)、nPoint NPXY100Z(0.1 nm、100 um可動域)。
推奨: 圧電フレクシャのみ。1 mm以上の可動域でサブナノメートル分解能が必要なら、マルチステージアーキテクチャが必要となる。
質問2: どの速度とストロークが必要か?
速度とストロークが合わさってモーションエンベロープを定義する。高速・長ストロークで優位な技術もあれば、低速・短ストロークで優位な技術もある。中間のオーバーラップゾーンが、選定議論の大半が発生する場所である。
速度を指定する際には、最大スルー速度(再位置決め時のピーク速度)、スキャン速度(作業プロセス中の一定速度)、整定時間(目標に到達し安定するまでの時間)を区別すること。500 mm/sでスルーするが整定に200 msかかるアクチュエータは、短い移動を多く行うアプリケーションでは、100 mm/sでスルーし5 msで整定するアクチュエータより実質的に遅い。
速度閾値
500 mm/s以上: Xeryon XLS(セラミック板共振器で速度密度と引き換えに力密度を犠牲にし1,000 mm/sに到達)を除くすべての圧電モータが除外される。500 mm/s以上の持続運動には、サーボモータ(回転+ボールねじまたはダイレクトドライブリニア)が唯一の実用的選択肢。Aerotech BLMXシリーズはピーク力4,252 Nで5 m/sに到達。ステッパーモータは技術的にこの速度域に到達するが、低速トルクの50%から80%を失い、信頼性に欠ける。
50から500 mm/s: サーボモータがデフォルト。ダイレクトドライブリニアサーボ(PI V-551、Aerotech ABL1500)がこの範囲を精度高く処理する。一部の超音波圧電モータもこの範囲で動作可能。PI PILine U-521は200 mm/s、進行波回転型の微細ピッチねじ駆動で100から200 mm/sを持続できる。ボイスコイルアクチュエータは短ストローク(10 mm以下)でこの範囲に到達。ステッパーはトルク低下により制限される。
1から50 mm/s: 超音波圧電モータの最適域。すべての技術がここで使用可能であり、分解能、環境、力が弁別因子となる。SmarAct SLC-2430は20 mm/s以上。PI N-310 NEXACTはサブナノメートル分解能で最大10 mm/s。
1 mm/s以下: 低速・超精密位置決め。ステッパーモータは低周波共振(典型的なステッパー/リードスクリュー組合せの共振速度は0.4から2 mm/sの範囲、まさにこの領域)のため困難。サーボモータは動作可能だがほぼ停動状態で全電力を消費し、計測精度を劣化させる発熱が生じる。圧電モータと圧電スタックが優れる。滑らかな運動、保持時ゼロ消費電力、共振アーティファクトなし。
ストローク閾値
ストロークは速度と相互作用し、さらに候補を絞り込む。この相互作用は荷重・ストローク・分解能のトレードオフの記事で詳述している。
1 mm以下: フレクシャ増幅型圧電スタックアクチュエータ。10 mmのPZTスタックは約10から15マイクロメートルのネイティブストロークを生成する。10:1のレバー増幅(Cedrat APAシリーズなど)でストロークは150マイクロメートルから1 mmに到達。ボイスコイルアクチュエータもサブmmストロークで動作可能。サーボやステッパーはこのスケールでは機械的に非実用的。
1から50 mm: 圧電モータとボイスコイルの自然な領域。PI PILine U-521は18 mm。SmarAct SLC-2430は31 mm。BEI KimcoやH2W Technologiesのボイスコイルは1から25 mmストローク。短いボールねじ付きサーボも使えるが、不必要な機械的オーバーヘッドを伴う。
50から500 mm: ボールねじまたはダイレクトドライブリニアモータ付きサーボモータ。圧電モータもこのストロークで利用可能(PI PILine N-381は306 mmをカバー)だが、速度が制限される。ボイスコイルは50 mm以上では磁石アセンブリの長さと発熱の問題で非実用的。
500 mm以上: ボールねじまたはローラーねじ付きサーボモータ。高精度アプリケーションにはダイレクトドライブリニアモータ。Aerotech PRO-LMシリーズは2メートルまでのストロークをカバー。マルチステージアーキテクチャを使用しない限り、他の技術はこのスケールでは実用的でない。
整定時間
アプリケーションが連続スキャンではなくムーブ・アンド・セトルのサイクルに支配される場合、ピーク速度より整定時間が重要となる。
- 圧電スタック: 0.5から5 ms(共振周波数が高く、通常1から50 kHz)
- ボイスコイル: 短ストロークで1から10 ms
- 圧電モータ: ストロークとコントローラチューニングに応じて2から20 ms
- サーボモータ: 最適化PID制御で5から50 ms
- ステッパーモータ: ステップ誘起リンギングにより10から100 ms
サブミリ秒の整定が必要な場合、フレクシャステージ内の圧電スタックアクチュエータが唯一の選択肢である。
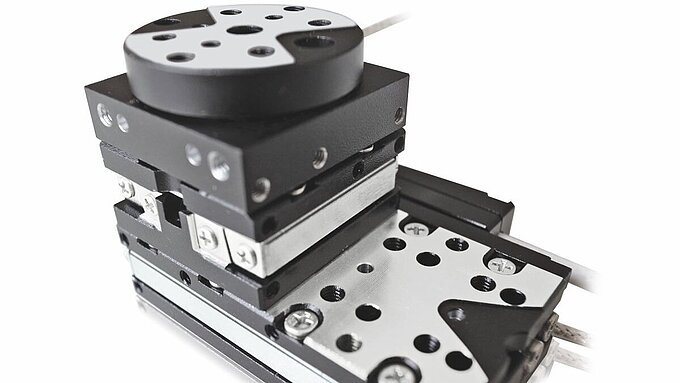
 SmarAct SLC-2430 スティックスリップポジショナー: 31 mm可動域、サブナノメートル閉ループ分解能、ゼロ電力保持を切手大のパッケージで実現。同等の可動域を持つサーボ・ボールねじステージは10から20倍のサイズと重量になる。出典: SmarAct
SmarAct SLC-2430 スティックスリップポジショナー: 31 mm可動域、サブナノメートル閉ループ分解能、ゼロ電力保持を切手大のパッケージで実現。同等の可動域を持つサーボ・ボールねじステージは10から20倍のサイズと重量になる。出典: SmarAct
質問3: どの力が必要か?
力の要件が技術を排除する頻度は分解能や速度ほどではないが、極端な値では決定的になりうる。
連続力(運転中に無期限に持続)、ピーク力(加速や外乱排除時の最大値)、保持力(静止時の位置維持)を区別すること。連続力と保持力の区別は重要であり、一部の技術はゼロ消費電力で位置を保持する一方、他の技術はフル停動電流を必要とするためである。
力の閾値
連続10 N以下: すべての技術が使用可能。精密位置決め、ファイバアライメント、光学部品調整などの一般的な範囲。選定は分解能、速度、ストローク、環境に完全に依存する。ボイスコイルは全ストロークにわたって極めてクリーンな定力を出力する。圧電モータはコンパクトなパッケージでゼロ電力保持と共にこの力を提供する。
連続10から100 N: ねじ駆動付きサーボモータがデフォルト。増幅型圧電アクチュエータも検討対象。Cedrat APA60SLは60 mmパッケージから390 Nの拘束力、52マイクロメートルストローク。Cedrat APA60MLは3,300 Nの拘束力。複数接触点やスタック構成の圧電モータは10から50 N。ボイスコイルアクチュエータもこの範囲に到達可能だが、かなりのI^2R発熱を生じる。
連続100から1,000 N: サーボモータが優位。ボールねじまたはローラーねじが効率的にモータトルクを変換する。ボイスコイルは特殊用途向けにこのレベルで存在する。圧電モータは一般にここでは競合しないが、PI N-216 NEXLINEはウォーキング圧電機構で600 Nの保持力を生成する例外。
連続1,000 N以上: ローラーねじ付きサーボモータ、または高速アプリケーション向けダイレクトドライブリニアモータ。Aerotech BLMXシリーズは4,252 Nピーク力。静的または準静的な力発生には、PIのPICA Power圧電スタックがモノリシックセラミックスタックから最大70,000 Nの拘束力を発生させる。モータではなく固体アクチュエータであり、マイクロメートル単位のストロークだが、クランプ、プレス、予圧用途で並外れた力密度を提供する。
保持力: 重要な区別
ゼロ速度での保持力は技術を明確に区別し、質問5(デューティサイクルと熱バジェット)に直結する。
- ステッパーモータ: ディテントトルクのみ(定格保持トルクの約5%から10%)でゼロ消費電力の保持が可能だが、定格電流での全保持トルクも利用可能。ほとんどのアプリケーションでは保持時にモータに通電し、1から5 Wを消費。
- サーボモータ: 保持力には連続電流が必要。消費電力はI^2 x Rに従い、長時間保持には熱管理が必要。ボールねじを介して50 Nを保持するサーボは10から30 Wを発熱として放散する可能性がある。
- ボイスコイル: サーボと同様。静的な力には連続電流と発熱が必要。ディテント力なし、受動保持なし。
- 圧電モータ: 摩擦予圧により、ゼロ消費電力で全保持力を発揮。保持力は通常、定格駆動力の2から10倍。5 Nの駆動力を持つモータが20から50 Nを受動的に保持できる場合がある。
- 圧電スタック: 現在位置でのゼロ消費電力保持。アンプの電源を完全にオフにできる。位置はセラミック剛性(通常10から500 N/マイクロメートル)によって維持される。
長時間(数分から数時間)の保持と位置安定性が要求されるアプリケーションでは、圧電モータと圧電スタックが根本的な熱力学的優位性を持つ。
質問4: 動作環境はどのようなものか?
環境制約は他のすべての検討事項に優先することがある。振動絶縁された光学テーブル上の大気圧環境で最適なアクチュエータが、真空、クリーンルーム、MRIスキャナー近傍、極低温では完全に不適合となることもある。これは最も頻繁に単一の明確な答えを導く質問である。
真空
粗引き真空 (1から10^-3 mbar): ほとんどのモータタイプは軽微な改修で動作可能。真空対応グリース(Braycote 601EF、Krytox GPL-225)と真空定格フィードスルーを使用。PIはL-220など多くのステージの真空対応(V6)バリアントを提供。
高真空 (10^-3から10^-8 mbar): 対流冷却が消失する。大気中で20 Wを消費するサーボは60度Cに達するが、高真空では150度C以上に達する。圧電モータ(保持時ゼロ消費電力、運動時1から5 W)は導入が格段に容易。ボイスコイルは50%から70%のデレーティングが必要。
 SmarAct UHV対応圧電ポジショナー(真空フランジ上)。全セラミック駆動メカニズムはアウトガスがなく、保持時の発熱もゼロであるため、対流冷却が利用できない真空環境で圧電モータが自然な選択肢となる。出典: SmarAct
SmarAct UHV対応圧電ポジショナー(真空フランジ上)。全セラミック駆動メカニズムはアウトガスがなく、保持時の発熱もゼロであるため、対流冷却が利用できない真空環境で圧電モータが自然な選択肢となる。出典: SmarAct
超高真空 (10^-8 mbar以下): アウトガスが支配的。すべての材料がASTM E595(TML 1%以下)を満たす必要がある。セラミック/金属構造の圧電モータがPI、SmarAct、Attocubeから入手可能。サーボモータは大幅な改修が必要で大気版の3から10倍のコスト。
クリーンルーム
パーティクル発生が適合性を決定する。ボールねじと循環ガイドは金属パーティクルを生成する。フレクシャガイド付き圧電モータステージはこの発生源を完全に排除する。ボールねじアセンブリからの潤滑剤アウトガスは化学的汚染を導入する。圧電モータは有機材料が少ない。ISO Class 5(Class 100)以上のクリーン環境では、フレクシャガイド付き圧電モータステージが最もリスクの低い選択肢である。詳細な汚染データはEMI、磁界、クリーンルーム環境の記事を参照。
極低温環境
PZTセラミックは液体ヘリウム温度まで圧電機能を維持する。77 Kでd33係数は約50%低下し、ストロークは減少するが機能は保持される。PI PICMAセラミック技術は-271度C(2 K)まで仕様化されており、超伝導磁石アセンブリや素粒子物理検出器に適する。
サーボモータとステッパーモータは極低温で潤滑剤固化(ほとんどのグリースは-60度C以下で固化)、磁気特性変化、配線脆化の問題に直面する。特殊な極低温モータ(Phytron、CDA InterCorp)が存在するが高価。ボイスコイルは適切な材料(SmCo磁石でNdFeBを代替)で極低温動作が可能。
非磁性環境
磁気的に敏感な機器(電子顕微鏡、SQUID磁力計、MRIシステム、イオンビームシステム)の近傍では、アクチュエータからの漂遊磁界が一次仕様となる。
- ステッパーおよびサーボモータ: 永久磁石と通電コイルを含む。100 mmでの漂遊磁界: モータサイズと設計に応じて0.1から10 mT。
- ボイスコイルアクチュエータ: 強力なNdFeB磁石を含む。100 mmでの漂遊磁界: 0.5から5 mT。磁気シールドの追加は質量と体積を大幅に増加させる。
- 圧電モータ: 永久磁石なし。保持時に通電コイルなし。残留磁界は本質的にゼロ。Acuvi LTC300圧電モータは10 mm距離で1 nT以下の漂遊磁界を発生。ほとんどの磁力計のノイズフロア以下である。
MRI対応デバイス、電子光学システム、アクチュエータ位置で0.5 mT以下の磁界が要求されるアプリケーションでは、圧電モータが磁気シールドを必要としない唯一の選択肢である。
放射線環境
圧電セラミックは10^9 rad(10^7 Gy)を超える線量まで放射線耐性がある。電子部品(エンコーダ、ドライバIC)がセラミックではなくシステムの制限要因となる。電磁モータもモータ自体は同様の放射線耐性を持つが、エンコーダとドライブエレクトロニクスがシステム限界を定義する。
質問5: デューティサイクルと熱バジェットは?
最後の質問はアクチュエータの経時的な使われ方に対処する。能動運動時間と保持時間の割合で定義されるデューティサイクルは、熱バジェットと強力に相互作用して技術を分離する。
高デューティサイクル(運動時間80%以上)
スキャンステージ、コンベヤ位置決め、検査システムでのラスタースキャンなど、ほぼ連続運動を要するアプリケーションでは電磁モータが有利。サーボおよびステッパーモータは連続回転用に設計されており、熱限界内で定格トルクを無期限に維持する。圧電モータは連続運転時に摩擦チップの摩耗に直面する。10,000から100,000時間の寿命仕様が一般的だが、これらは間欠デューティを前提としている。100%デューティでは摩耗率が増加し、寿命は速度、荷重、環境条件に応じて1,000から5,000時間に低下する可能性がある。
推奨: 10 mm/s以上の連続スキャンにはサーボモータ。低速連続のコスト重視アプリケーションにはステッパーモータ。環境制約(真空、クリーンルーム、非磁性)が必須の場合のみ圧電モータ。
低デューティサイクル、長時間保持(運動時間20%以下)
光学アライメント、半導体治具位置決め、キャリブレーション調整のように、動作頻度は低いが長時間の位置保持が必要なアプリケーションでは、圧電モータと圧電スタックが強く有利。これらの技術は摩擦予圧(モータ)またはセラミック剛性(スタック)を通じて、ゼロ消費電力で位置を保持する。発熱なし、熱ドリフトなし、電源不要。
位置保持するサーボモータは連続的にI^2R電力を消費する。20 Nの重力荷重にボールねじを介して抗するサーボは5から15 Wを消費し、数時間で局所温度が5から20度C上昇する可能性がある。計測アプリケーションでは、この熱的擾乱が測定精度を直接劣化させる。
推奨: 圧電モータまたは圧電スタック。エネルギー節約は時間とともに累積し、温度安定性の優位はエネルギー節約以上に価値がある場合が多い。
温度感度の高い計測
干渉計測定、ウェーハ計測、三次元測定機、光周波数標準など、温度安定性が一次性能指標であるアプリケーションでは、アクチュエータの熱出力がシステム性能を直接制限する。
考えてみよう。アルミニウムステージ(熱抵抗2 K/W)に10 Wを消費するサーボはステージ温度を20度C上昇させる。23 ppm/KのCTEで200 mmのアルミニウムステージは92マイクロメートル伸長し、モータの分解能仕様を完全に圧倒する。保持時に0 Wを消費する圧電モータは無視可能な熱的擾乱を導入する。ナノメートル級のほぼすべての計測システムが圧電アクチュエーションを使用しているのはこのためである。モータがより精密だからではなく、発熱が少ないからである。
高速連続スキャン
表面プロファイリング、ウェーハ検査、レーザ加工など、連続的な等速スキャンを要するアプリケーションでは、アクチュエータが長時間にわたって滑らかでジッターのない運動を維持しなければならない。ダイレクトドライブリニアサーボモータはここで優れる。機械伝達のアーティファクトなしに連続力を発生するためである。アイアンレスリニアモータ(PI V-551、Aerotech ABL1500)は0.01%以下の速度リップルでゼロコギングスキャンを提供する。
圧電モータは連続スキャンにはやや不向きである。摩擦駆動メカニズムが超音波駆動周波数で本質的にマイクロ振動を生成するためである。スキャンアプリケーションでは、ボイスコイルアクチュエータも短ストロークで優れた選択肢となる。定力でゼロコギングだからである。
デシジョンツリーの実践
5つの質問を順に処理すると、急速に収束する。
ステップ1(分解能): 10 um以上ならすべてのオプションを維持。1から10 umなら閉ループ制御を追加しない限りステッパーを除外。1 um以下ならステッパーを完全に除外し、サーボ(ダイレクトドライブ)、ボイスコイル、圧電で進む。100 nm以下ならストロークが1 mm以下でなければボイスコイルを除外し、エアベアリングと干渉計フィードバックの予算がなければサーボを除外。
ステップ2(速度): 500 mm/s以上なら常にサーボモータ。50から500 mm/sならサーボが好ましく、分解能が1 um以下かつストローク100 mm以下の場合のみ圧電が有力。1から50 mm/sなら力の検討へ(オーバーラップゾーン)。1 mm/s以下なら圧電が強く推奨。
ステップ3(力): 連続100 N以上ならねじ駆動付きサーボ(またはマイクロストローク用PICA Powerスタック)。10から100 Nならサーボが好ましく、環境が要求する場合に圧電が競合。10 N以下なら残存するすべての候補が有力。
ステップ4(環境): 10^-3 mbar以下の真空、ISO 5以上のクリーンルーム、非磁性、-40度C以下の極低温の場合は圧電が強く推奨。大気圧で磁気非感度なら制約なし。
ステップ5(デューティサイクル): 高デューティ(運動80%以上)ならサーボまたはステッパーが有利。長時間保持なら圧電が有利。温度感度がゼロ電力保持の優位性を増幅する。
二つの技術が生き残った場合は、技術全体の再評価ではなく、システムコスト、統合の複雑さ、メーカーサポートに焦点を当てた集中的なトレードスタディを実施すべきである。
アクチュエータ選定における一般的な過ち
同じ過ちが業界を問わず繰り返し発生する。
分解能の過剰仕様
プロセスが1マイクロメートル精度を要求するのに「より高い分解能は害にならない」として10 nm分解能を指定するエンジニア。害になりうる。高い分解能はより高価なエンコーダ、より堅固な構造、より優れた除振、より洗練されたコントローラを要求する。10 nmシステムは1マイクロメートルシステムの5から10倍のコストとなり、剛性要件が他の制約と衝突するため性能が悪化する可能性がある。対処法: プロセス公差から分解能を指定すること。ワークピース公差が2マイクロメートルなら、アクチュエータ分解能は200から500 nm(4から10倍細かい)であるべきで、10 nmではない。
デューティサイクルの無視
30秒間動作して5分間保持する軸にサーボモータを選定すると、熱コストを見落とす。サーボは5分間の保持中ずっとフル保持電力を消費する。8時間シフトで数百ワット時が熱として蓄積する。圧電モータは保持時にゼロエネルギーを消費する。
ストロークと分解能の混同
100 mm可動域で10 nm分解能を指定すると、単一デバイスに10^7のダイナミックレンジを要求する。これを実現できるアクチュエータはごく少数。二段式の粗動/微動アーキテクチャ(サーボでストローク、圧電スタックで微動位置決め)の方が安価で、実装が速く、堅牢であることが多い。
静的保持へのボイスコイル使用
ボイスコイルは電流に比例した力をゼロのディテントまたは摩擦力で生成する。重力に対する位置保持には連続電流が必要で、コイルと周辺システムを劣化させるI^2R発熱を生じる。圧電モータやステッパーが受動保持を提供できる場面でボイスコイルを使用するのは熱バジェットの誤りである。
動作環境の軽視
「真空対応版が入手できるから」と真空用にサーボを選定すると、熱問題を見過ごす。真空グリースとフィードスルーはアウトガスに対処するが、対流で逃がせなくなった20 Wの熱には何の効果もない。モータには放射冷却または伝導ヒートシンクが必要であり、いずれも設計努力とコストを追加する。
サブミクロン作業へのステッパー選定
計算上のマイクロステップサイズに基づいてサブミクロン作業にリードスクリュー付きステッパーモータが選ばれることがある。ピッチ0.5 mmリードスクリューでの1/256マイクロステップは理論上2 nmのステップを生成する。しかし実際には、リードスクリューには5から20 umのピッチ誤差、1から10 umのバックラッシュがあり、マイクロステッピング時のモータトルクプロファイルは階段状ではなく正弦波状である。1/16以下のマイクロステッピングではトルクが低すぎて静摩擦を確実に克服できない。実用MIMが1 um以下になることは稀である。
多技術比較表
以下の表は精密位置決めアプリケーションに最も関連するパラメータについて、6つのアクチュエータアーキテクチャを比較している。範囲は理論的限界ではなく、典型的な市販製品を表す。これらのトレードオフの背後にある物理のより深い分析は圧電モーション技術の比較を参照。
| パラメータ | 圧電スタック (フレクシャ) | 増幅型圧電 | 超音波圧電モータ | ボイスコイル | サーボ+ボールねじ | ダイレクトドライブリニアモータ |
|---|---|---|---|---|---|---|
| ストローク | 5~500 um | 50 um~2 mm | 5~300+ mm | 0.1~50 mm | 25~2,000+ mm | 50~2,000+ mm |
| 分解能 | 0.05~1 nm | 1~10 nm | 0.5~50 nm | 5~500 nm | 50 nm~5 um | 5~100 nm |
| 連続力 | 10~30,000 N | 50~3,300 N | 0.3~600 N | 0.5~200 N | 50~10,000 N | 10~5,000 N |
| 最大速度 | N/A (静的) | N/A (静的) | 10~1,000 mm/s | 10~500 mm/s | 10~1,000 mm/s | 100~6,000 mm/s |
| 帯域幅 (-3 dB) | 1~50 kHz | 100 Hz~5 kHz | 10~500 Hz | 50~2,000 Hz | 10~200 Hz | 50~500 Hz |
| 保持時消費電力 | 0 W | 0 W | 0 W | I^2*R (大) | I^2*R (中) | I^2*R (中) |
| 発熱 | 無視可能 | 無視可能 | 低 (運動時) | 大 | 中~大 | 中 |
| 磁界 | なし | なし | なし | 強 (NdFeB) | 中 | 中~強 |
| 真空適合性 | 優秀 | 優秀 | 優秀 | 良 (デレーティング) | 可 (熱) | 可 (熱) |
| 概算コスト (単軸) | $1,000~$15,000 | $500~$5,000 | $2,000~$12,000 | $500~$5,000 | $1,000~$10,000 | $5,000~$50,000 |
| 典型サイズ | コンパクト | コンパクト | コンパクト | 中型 | 大型 | 大型 |
選定の計算例
以下の5つの例題は実用的なアプリケーションに対して5つの質問フレームワークを適用し、順次絞り込みプロセスが技術選択に収束する様子を示す。
例1: 半導体ウェーハZ軸フォーカス
アプリケーション: 300 mmウェーハ検査ツールのZ軸オートフォーカス。光学アセンブリ(質量200 g)がXYスキャン中にウェーハ表面トポグラフィを追従する。
- 必要分解能: 50 nm(プロセス公差: 焦点深度500 nm)
- 必要速度: フォーカス追従に5 mm/s、ウェーハロード/アンロード再位置決めに20 mm/s
- 必要ストローク: 2 mm(ウェーハの反りとカセット変動に対応)
- 必要力: 2 N(200 g光学系の重力)
- 環境: ISO Class 3クリーンルーム、除振花崗岩
Q1 (分解能): 50 nmでステッパー除外。サーボ(ダイレクトドライブ)、ボイスコイル、圧電が残る。
Q2 (速度/ストローク): 20 mm/sと2 mmストロークは3候補すべての範囲内。
Q3 (力): 2 Nは3候補すべてにとって些末。
Q4 (環境): ISO Class 3クリーンルームが圧電モータまたはボイスコイル(ボールねじパーティクルなし)を強く推奨。エアベアリング付きダイレクトドライブサーボは過大。
Q5 (デューティサイクル): 検査中はZ軸が連続追従(高デューティ)。ウェーハ交換中は位置保持。熱バジェットが重要。光学系近傍の発熱は画質を劣化させる。
 半導体ウェーハ位置決めステージ。クリーンルーム適合性、温度安定性、サブ100 nm分解能の要件が、ウェーハ検査Z軸フォーカスに圧電モータを支配的技術としている。出典: PI
半導体ウェーハ位置決めステージ。クリーンルーム適合性、温度安定性、サブ100 nm分解能の要件が、ウェーハ検査Z軸フォーカスに圧電モータを支配的技術としている。出典: PI
判断: 圧電モータ(PI PILine U-521または同等品)。ゼロ電力保持、クリーンルーム適合性、最小限の熱出力のため。圧電フレクシャステージ(PI P-721 PIFOC、100 um可動域)は、機械的プレポジショニングで2 mmストローク要件を100 umに低減できれば有効。2 mmフルストロークにはカウンターバランスばね付きボイスコイルが代替案となるが、追従時の熱出力増加を受け入れる必要がある。
例2: CNC工作機械軸
アプリケーション: 立形フライス盤のX軸。500 mm可動域、最大2,000 Nの切削力、30 m/min(500 mm/s)の早送り。
- 必要分解能: 5 um(部品公差50 um)
- 必要速度: 早送り500 mm/s、切削送り50 mm/s
- 必要ストローク: 500 mm
- 必要力: 連続切削力2,000 N、断続切削時ピーク4,000 N
- 環境: 産業用、クーラントミスト、切粉、10度Cの温度変動
Q1 (分解能): 5 umはすべての技術で達成可能。除外なし。
Q2 (速度/ストローク): 500 mm/sで500 mmストロークがすべての圧電モータ、ボイスコイル、圧電スタックを即座に除外。サーボモータとステッパーモータのみが残る。ステッパーは500 mm/sでトルク低下が著しく限界的。
Q3 (力): 連続2,000 Nがステッパーモータを除外(典型的NEMA 34ステッパー+リードスクリュー: 最大500から1,000 N)。サーボモータのみが残る。
Q4 (環境): 産業環境は特別な制約を課さない。IP65保護の標準サーボモータ。
Q5 (デューティサイクル): 高デューティサイクル、数時間の連続運転。サーボモータはまさにこの用途のために設計されている。
判断: 精密ボールねじ(C3またはC5級)とリニアエンコーダ付きサーボモータ。具体的にはFanuc Alpha iFサーボシリーズまたはSiemens 1FK7と、THKまたはNSKのボールねじ。5つの質問が急速に収束する明快なケース。
例3: MRI対応手術ロボットの関節
アプリケーション: 3T MRIボア内で動作するニードル挿入ロボットの回転関節。MRIがリアルタイム画像誘導を提供しながらロボットが生検針を位置決め。
- 必要分解能: 針先で0.1 mm(100 um)角度等価(50 mmレバーアーム、約2 mradまたは0.1度)
- 必要速度: 針先で5 mm/s(低速・慎重な挿入)
- 必要ストローク: 挿入深さ200 mm、回転90度
- 必要力: 挿入力10 N、回転トルク0.5 Nm
- 環境: 3T MRI磁界(強磁性材料と電磁放射に極めて敏感)
Q1 (分解能): 100 umはすべての技術で達成可能。除外なし。
Q2 (速度/ストローク): 5 mm/sと200 mmストロークは圧電モータ、サーボ、ステッパーの範囲内。除外なし。
Q3 (力): 10 Nと0.5 Nmは控えめ。すべての技術が適格。
Q4 (環境): 3T MRI磁界。これが決定的な質問である。ステッパーモータ: 永久磁石と鋼鉄積層板が強磁性。除外。サーボモータ: 永久磁石が強磁性。除外。ボイスコイル: NdFeB磁石が強磁性。除外。圧電モータのみが生き残る。永久磁石なし、強磁性材料なし(適切な構造の場合)、漂遊磁界なし。
Q5 (デューティサイクル): 低デューティ。針がゆっくり前進し保持。圧電の摩擦予圧によるゼロ電力保持はイメージングシーケンス中に電磁干渉を生じないため理想的。
判断: 超音波圧電モータ。具体的には、Shinsei(USR60進行波型)、PiezoMotor(Piezo LEGS)、またはNanomotionのカスタム設計。リニアアクチュエーションが必要な場合、Acuvi LTC300は10 mmで1 nT以下の漂遊磁界で特に適する。複数のメーカーが圧電モータのみを使用したMRI条件付きロボットシステムを現在生産している。
例4: レーザビームステアリングミラー
アプリケーション: 補償光学システムの高速チップ・チルトミラー。ミラー(質量5 g)が最大1 kHz帯域幅で大気揺らぎを補正。
- 必要分解能: 0.1 urad(5 mmレバーアームで約0.5 nm)
- 必要速度: 高帯域(1 kHz)での小角度運動、高リニア速度ではない
- 必要ストローク: アクチュエータで約+-10 um(機械角+-2 mrad、光学角+-4 mrad)
- 必要力: 0.5 N未満(5 gミラー質量、低摩擦)
- 環境: 実験室、除振光学テーブル、温度管理された室内
Q1 (分解能): アクチュエータでの0.5 nm等価がステッパー、サーボ、ほとんどのボイスコイルを除外。圧電スタックと高性能ボイスコイルのみが残る。
Q2 (速度/ストローク): 要件は帯域幅であり、リニア速度ではない。1 kHzで+-10 umストローク。圧電スタックは自然に適する。10 mmスタックは50から100 kHzの共振周波数を持ち、十分な帯域マージンを提供。ボイスコイルも小ストロークで1 kHz帯域を達成可能。
Q3 (力): 0.5 N未満。両技術とも些末に処理可能。
Q4 (環境): 特別な制約なし。実験室環境。
Q5 (デューティサイクル): 観測中数時間の連続運転。圧電スタックは容量、周波数、電圧振幅に比例した電力を消費する。1 kHz、10 umストロークでの典型的なスタック消費電力は0.5から2 Wで管理可能。ボイスコイルは連続的にI^2Rを消費。
判断: チップ・チルトフレクシャマウント内の圧電スタックアクチュエータ。PI S-330チップ・チルトプラットフォーム(2 mrad、1 kHz、静電容量センサオプション)またはPI S-340がより大きな角度向け。ボイスコイルチップ・チルトミラー(Optics In Motion OIM201など)は代替案で、消費電力と熱出力を代償にやや大きなストロークを提供。1 kHz帯域でサブマイクロラジアン分解能には、圧電スタックアプローチがより実績があり広く展開されている。
例5: ファイバアライメント 6自由度
アプリケーション: シングルモードファイバからフォトニック集積回路(PIC)ファセットへの自動アライメント。X、Y、Zで50 nm以上の分解能、チップ・チルトで0.01度以上の分解能で結合ピークを見つけ維持。
- 必要分解能: リニア50 nm、角度0.01度
- 必要速度: サーチスキャン10 mm/s、微調整サブmm/s
- 必要ストローク: 軸あたり10 mmサーチ範囲
- 必要力: 1 N未満(ファイバとホルダ質量10から50 g)
- 環境: ISO 6クリーンルーム、+-0.5度C温度管理
- 数量: 年200システム
Q1 (分解能): 50 nmでステッパー除外。サーボ、ボイスコイル、圧電が残る。
Q2 (速度/ストローク): 10 mm/sと10 mmストロークは3候補すべての範囲内。
Q3 (力): 1 N未満。すべての技術が対応。
Q4 (環境): ISO 6クリーンルームが圧電を推奨(ボールねじパーティクルなし)。ボイスコイルも許容可能。エアベアリング付きダイレクトドライブサーボは過大で高価。
Q5 (デューティサイクル): アライメントスキャン中は連続運動(中デューティ)。アライメント後は接着剤硬化中に位置保持(数分間)。硬化中のゼロ電力保持が、最適化された結合位置をずらしうる熱ドリフトを防止。
判断: 6自由度ヘキサポッドまたはXYZ+チップ・チルト構成の圧電スティックスリップモータ。SmarAct SMARPOD 70.42が6自由度で1 nm分解能をコンパクトパッケージで提供。PIもPILineまたはNEXACTドライブを使用したヘキサポッドソリューション(H-811.S2)を提供。低コストアプローチとしては、個別のSmarAct SLC-2430ステージをX、Y、Zに積み重ね、別途チップ・チルトステージを組み合わせる方法がある。ゼロ電力保持とクリーンルーム適合性により、圧電スティックスリップがこのアプリケーションの標準技術であり、SmarActがフォトニックパッケージングアライメントの支配的なメーカーとなっている。
環境別判定マトリクス
以下の表は動作環境と技術適合性を直接対応させ、質問4の環境分析を統合している。
| 環境 | 圧電スタック | 圧電モータ | ボイスコイル | サーボ+ボールねじ | ダイレクトドライブリニア | ステッパー+リードスクリュー |
|---|---|---|---|---|---|---|
| 大気圧 (ラボ/産業) | 適合 | 適合 | 適合 | 適合 | 適合 | 適合 |
| 粗引き真空 (10^-3 mbarまで) | 適合 | 適合 | 適合 (デレーティング) | 改造要 (グリース) | 改造要 (グリース) | 改造要 (グリース) |
| 高真空 (10^-3~10^-8 mbar) | 適合 | 適合 | 限界的 (熱) | 困難 (熱) | 困難 (熱) | 困難 (熱) |
| 超高真空 (10^-8 mbar以下) | 適合 (UHV材料) | 適合 (UHV材料) | 限界的 | 高価な改造 | 高価な改造 | 稀 |
| クリーンルーム ISO 5以上 | 適合 | 適合 | 適合 | 限界的 (パーティクル) | 適合 (ねじなし) | 限界的 (パーティクル) |
| 極低温 (-40度C以下) | 適合 (ストローク低下) | 適合 (ストローク低下) | 改造要 (材料) | 専用モータ | 専用モータ | 専用モータ |
| 非磁性 (0.5 mT以下) | 適合 | 適合 | 不適合 | 不適合 | 不適合 | 不適合 |
| 放射線 (10^6 rad以上) | 適合 (セラミック耐放射線) | 適合 (セラミック耐放射線) | 適合 | 適合 | 適合 | 適合 |
| 高湿度 (80% RH以上) | 限界的 (電極保護) | 適合 (密封) | 適合 (密封) | 適合 (密封) | 適合 (密封) | 適合 (密封) |
パターンは明白である。圧電技術が最も広い環境適合性を持つ。複数の制約を組み合わせるアプリケーション(例: 超伝導磁石近傍の極低温真空)では、圧電アクチュエータが大規模なカスタム工学なしに使える唯一の選択肢となることが多い。
単一技術で対応できない場合
一部のアプリケーションでは、単一のアクチュエータでは満たせない要件が指定される。最も一般的なケースは、長ストロークとナノメートル分解能の組合せである。200 mm可動域で10 nm分解能は2 x 10^7のダイナミックレンジを要求する。これを実現できる単一ステージシステムは少なく、実現できるもの(干渉計フィードバック付きエアベアリングステージ)は軸あたり$50,000から$150,000のコストとなる。
マルチステージ(粗動/微動)アーキテクチャ
解決策は運動を二つのステージに分解することである。粗動ステージが中程度の分解能で長ストロークを提供する。粗動ステージ上に搭載された微動ステージが短ストロークでナノメートル分解能を提供する。二つのステージは協調制御ループで動作する。
ボールねじ + 圧電フレクシャ微動ステージ: 最も一般的な組合せ。ボールねじ付きサーボモータが200 mmの可動域で1マイクロメートル分解能を提供。移動プラットフォーム上の静電容量センサ付き圧電スタックが+-50マイクロメートルの微動で0.5 nm分解能を提供。粗動ステージが10マイクロメートル以内に位置決めし、微動ステージが残余誤差を補正。システム分解能: 0.5 nm。システム可動域: 200 mm。米国エネルギー省(OSTI)のデータにより、デュアルステージアーキテクチャがシンクロトロンビームラインモノクロメータやナノリソグラフィシステムで200 mm可動域にわたって10 nm精度を日常的に達成していることが確認されている。
サーボ + 圧電モータ: 圧電スタックが提供できる以上の微動ステージ可動域(5から50 mm)が必要なアプリケーション向け。圧電モータが20 mmにわたる1 nm分解能の微動ステージとして機能し、粗動ステージの繰り返し精度誤差を吸収する。
ステッパー + ボイスコイル: コスト重視のアプリケーション向け。ステッパーが長距離粗動を提供し、ボイスコイルが定力での微動位置決めを行う。オートフォーカスシステムやディスクドライブヘッド位置決めで一般的。
荷重・ストローク・分解能のトレードオフの記事では、この分解がなぜ必要であり、性能境界がどのように最適な粗動/微動分割点を定義するかを詳述している。
マルチステージシステムの設計ガイドライン
マルチステージ設計の実用ルール:
- 微動ステージのストロークは粗動ステージの繰り返し精度の2から5倍を超える必要がある。 粗動ステージの繰り返し精度が5 umなら、微動ステージは10から25 umのストロークが必要。
- 微動ステージの帯域幅は粗動ステージの帯域幅の5から10倍を超える必要がある。 協調ループが機能するための条件。
- 微動ステージの質量を最小化すること。 フレクシャ内の圧電スタック(50から200 g)は圧電モータステージ(200から500 g)より軽量だがストロークは短い。
- ケーブル配線は微動ステージの性能を劣化させる力を導入しないよう、粗動ステージの可動域に対応する必要がある。
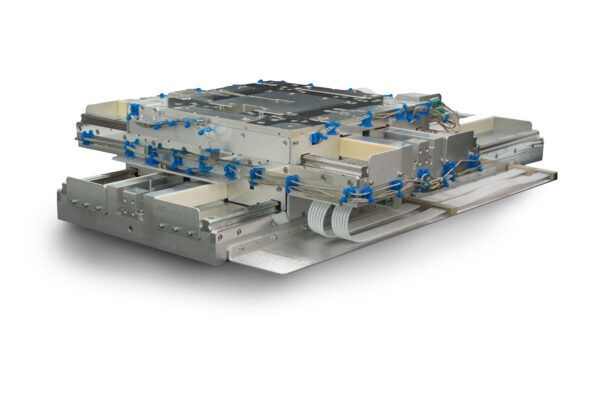
 マルチステージ積層アーキテクチャ: XYリニアステージ(下段)が回転ステージとZ軸ステージ(上段)を搭載。長距離粗動とペイロードでの微動位置決めを組み合わせる。単一技術の性能限界を、要件を特化型ステージに分散させることで拡張するアプローチ。出典: PI
マルチステージ積層アーキテクチャ: XYリニアステージ(下段)が回転ステージとZ軸ステージ(上段)を搭載。長距離粗動とペイロードでの微動位置決めを組み合わせる。単一技術の性能限界を、要件を特化型ステージに分散させることで拡張するアプローチ。出典: PI
実用サマリー
5つの質問フレームワークは、自由度の高い評価を構造化された排除プロセスに還元する。凝縮した判断ルールを以下に示す。
100 nm以下の分解能が必要なら: 圧電を使用(1 mm以上の可動域にはモータ、500 um以下の可動域にはスタック/フレクシャ)。
500 mm/s以上の速度が必要なら: サーボモータを使用。
長ストロークで100 N以上の力が必要なら: ボールねじまたはローラーねじ付きサーボモータを使用。
真空、クリーンルーム、極低温、非磁性環境で動作するなら: 特定のパラメータ(速度、力、ストローク)が不可能にしない限り圧電を使用。
長時間の位置保持が必要なら: 圧電を使用(ゼロ消費電力、ゼロ発熱、ゼロドリフト)。
長ストロークでナノメートル分解能が必要なら: マルチステージ粗動/微動アーキテクチャを使用。
環境や極端な分解能の制約がなく、速度要件が50 mm/s以上なら: サーボモータをデフォルトに。最も深いサプライチェーン、最も成熟した制御エコシステム、最も広いメーカー選択肢を持つ。
特定の技術ペア間の比較については、専門記事で詳細な分析を提供する。最も一般的な選定議論には圧電対サーボ、コスト重視のアプリケーションには圧電対ステッパー、短ストローク定力アプリケーションには圧電対ボイスコイル。圧電バリアント間(スタック、増幅型、超音波、スティックスリップ、NEXLINEウォーキングドライブ)の内部選定は圧電モーション技術の比較の記事でカバーしている。
このフレームワークはすべてのケースで最適な選択を保証するものではない。しかし、最初の10分で明らかに不適切な選択肢を排除し、成功確率の最も高い1つか2つの候補にエンジニアリングの努力を集中させる。それだけで数週間の無駄な努力が節約され、方針変更が手遅れになってから基本要件を満たさない技術にコミットする高価な過ちを防ぐことができる。