基礎原理
超音波圧電モーターの動作原理
共振ステーター駆動の物理
はじめに
皆さんが日常的に使用する電磁モーターは、ハードディスクのスピンドルからCNCガントリーのサーボまで、すべて同じ原理で動作しています。コイルに電流を流して磁場を発生させ、その磁場が永久磁石と反発し合い、ローターが回転する。この基本的な仕組みは150年以上変わっていません。
超音波圧電モーターは、このパラダイムを根本から覆します。コイルもなければ、磁石もなく、回転軸もありません(意図的に設計しない限り)。代わりに、セラミック素子が超音波周波数で振動し、その振動が摩擦を介してリニアまたは回転運動に変換されます。
この記事では、結晶レベルの物理から完成したステージシステムまで、超音波圧電モーターの動作原理を体系的に解説します。設計にピエゾモーターの採用を検討しており、データシートを読む前に物理を理解しておきたいエンジニアの方は、ここから始めてください。
コアメカニズムの概要
圧電セラミック(一般にPZT、チタン酸ジルコン酸鉛)を金属製のステーターに接合します。このセラミックにステーターの機械的共振周波数と一致するAC電圧を印加すると、ステーターが振動します。ステーター先端は超音波周波数(通常39~180 kHz)で楕円軌道を描きます。この先端がリニアモーターでは「レール」、回転モーターではローターと呼ばれる可動要素に押し付けられ、接触点の摩擦力が楕円振動を連続的なリニアまたは回転運動に変換します。
極めてシンプルな原理ですが、そこから生まれる工学的な特性は驚くほど豊かです。
圧電素子
「圧電(piezoelectric)」という言葉は、ギリシャ語の「piezein(圧力)」と「elektron(電気)」に由来します。特定の結晶は、機械的応力を加えると電圧を発生し(正圧電効果)、逆に電圧を印加すると変形します(逆圧電効果)。天然の水晶でもこの効果は観察されますが、その大きさはごくわずかです。モーターを構成できるほど強力な圧電効果を発揮するのは、人工的に合成されたPZTセラミックスです。
 PZTセラミック素子の各種形状。白色および暗色のバーが、金属ステーターに接合される能動素子です。画像提供:Nanomotion Ltd.
PZTセラミック素子の各種形状。白色および暗色のバーが、金属ステーターに接合される能動素子です。画像提供:Nanomotion Ltd.
Nanomotion方式の楕円運動生成
Nanomotion方式のモーターでは、薄いPZTプレートが金属ステーターバーの片面に接合されています。セラミック上の電極パターンは、2つの直交する振動モードを同時に励起するよう設計されています。1つは、ステーターを長さ方向に伸縮させる縦振動モード。もう1つは、ステーターを左右にたわませる曲げ振動モードです。
この2つのモードを同じ周波数で、かつ90度の位相差をもって駆動すると、ステーター先端のセラミックフィンガーが楕円軌道を描きます。縦モードが前後方向の変位を生み出し、曲げモードが上下方向の変位を生み出すため、両者が合成されて楕円運動となるのです。
この楕円運動を安定して生成するには、縦モードと曲げモードの共振周波数がほぼ一致するようにステーター形状を精密に設計する必要があります。この条件を「モーダル縮退」と呼び、製造公差内でこの縮退を達成することが定在波モーター設計の核心的な工学課題です。
振動から運動へ
ここで重要なのは、フィンガー先端が描くのが円ではなく「楕円」であるという点です。楕円の前半では、フィンガーがレールに押し付けられ、摩擦力でレールを前方に押し出します。楕円の後半では、フィンガーがレール表面からわずかに浮き上がる(少なくとも接触力が低下する)ことで後退します。この前進と後退の非対称性が、正味として一方向への連続運動を生み出します。親指を人差し指の腹でこするような動作をイメージしてください。
摩擦駆動がもたらす工学的利点
この摩擦駆動メカニズムは、深遠な工学的帰結をもたらします。
自己保持性。 モーターは静止時に電力を消費せずに位置を保持します。摩擦プリロードがそのまま保持力として機能するため、ブレーキも保持電流も必要ありません。
ゼロバックラッシュ。 ギア列が存在しないため、方向反転時のバックラッシュがゼロです。摩擦接触は本質的にバックラッシュフリーです。
ナノメートル級の位置決め。 モーターの分解能はモーター自体ではなく、エンコーダーとコントローラーによってのみ制限されます。振動サイクルごと(毎秒39,000回以上)にレール表面と係合するため、実効的なステップサイズはサブナノメートルとなり、ナノメートル級の位置決めは日常的に達成されます。
モーターエレメント
単一エレメントの驚くべきコンパクトさ
単一のモーターエレメントは驚くほど小型です。Nanomotion HR1(フィンガー1本)は、ほぼ切手サイズに収まります。推力は約0.4 Nです。より大きな推力が必要な場合は、フィンガー数を増やすだけで対応できます。HR2は2本、HR4は4本、HR8は8本のフィンガーを備えています。すべてのフィンガーが同じレールに押し付けられるため、推力はフィンガー数に正比例してリニアにスケールします。
 HR1:フィンガー1本、推力0.4 N。画像提供:Nanomotion Ltd.
HR1:フィンガー1本、推力0.4 N。画像提供:Nanomotion Ltd.
 HR4:フィンガー4本、推力1.6 N。画像提供:Nanomotion Ltd.
HR4:フィンガー4本、推力1.6 N。画像提供:Nanomotion Ltd.
極限の小型化
超音波圧電モーターのもう一つの強みは、小型化しても位置決め分解能が低下しないことです。Nanomotion Edgeモーターはピン先ほどのサイズですが、フルサイズのモーターと同等のサブナノメートル分解能を維持しています。
 Edgeモーター、スケール比較用のピンとの対比。超音波圧電モーターは極限まで小型化しても位置決め分解能を失いません。画像提供:Nanomotion Ltd.
Edgeモーター、スケール比較用のピンとの対比。超音波圧電モーターは極限まで小型化しても位置決め分解能を失いません。画像提供:Nanomotion Ltd.
完成モーターアセンブリ
リニアステージの構造
リニアステージでは、複数のモーターエレメントがセラミックストリップ(レール)に対してプリロードされた状態で組み込まれます。プリロード力の調整は極めて重要です。力が小さすぎるとフィンガーがスリップし、大きすぎるとモーターが失速するか、早期摩耗の原因となります。
レール表面には通常アルミナ(Al2O3)が使用されます。アルミナが選ばれる理由は、硬度が高く摩擦係数が安定しているためです。この一貫した摩擦特性が、超音波モーターの安定動作に不可欠です。
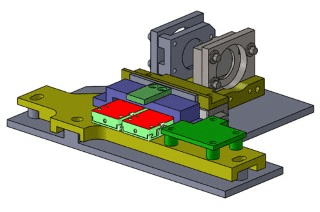 リニアステージのCAD断面。カラーブロック(モーターエレメント)がクロスローラーベアリング上のセラミックレールにプリロードされた構造。画像提供:Nanomotion Ltd.
リニアステージのCAD断面。カラーブロック(モーターエレメント)がクロスローラーベアリング上のセラミックレールにプリロードされた構造。画像提供:Nanomotion Ltd.
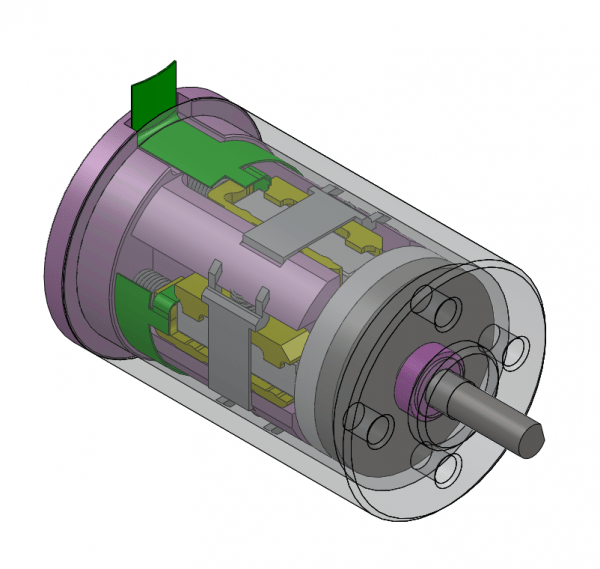 ロータリーモーターのカットアウェイ。圧電素子(黄色)が摩擦接触でローターを駆動します。磁石もコイルも存在しません。画像提供:Nanomotion Ltd.
ロータリーモーターのカットアウェイ。圧電素子(黄色)が摩擦接触でローターを駆動します。磁石もコイルも存在しません。画像提供:Nanomotion Ltd.
ロータリーモーターへの応用
同じ原理は回転運動にもそのまま適用できます。リニアモーターのレールをリング状のローターに置き換え、モーターエレメントをその外周に配置するだけです。磁石もコイルも不要であるため、ロータリーモーターは本質的に非磁性であり、電子ビーム装置やMRI近傍など、磁場が許容されない環境でも使用できます。
速度と推力の特性
超音波圧電モーターの速度と推力の関係は、電磁モーターとは大きく異なる特徴的なカーブを描きます。
無負荷時にモーターは最大速度で動作します(リニアステージで通常150~300 mm/s)。負荷が増加すると、速度はほぼ直線的に低下し、最終的にモーターは失速します。DCモーターではトルクと速度の関係はより緩やかなカーブを描きますが、圧電モーターではこの低下が急峻です。
この特性の実務的な意味合いは明確です。圧電ステージの設計では、最大速度ではなく負荷条件での速度を基準に設計します。無負荷250 mm/sのモーターでも、実際の作業荷重下では100 mm/sしか出ない場合があります。これは異常ではなく、圧電モーターの正常な動作特性です。
設計にとっての意義
摩擦駆動メカニズムは、電磁モーターでは同時に実現できない特性の組み合わせを超音波圧電モーターに付与します。
超音波圧電モーター vs. 電磁モーター
| Parameter | 圧電超音波 | DCサーボ | ステッピングモーター |
|---|---|---|---|
| 分解能 | < 1 nm | 50-500 nm | 1-10 μm |
| 静止時保持力 | 無電力保持 | 通電が必要 | 保持トルク |
| バックラッシュ | ゼロ | ギア依存 | ギア依存 |
| 磁気放射 | なし | あり | あり |
| 真空適合性 | 本質的に対応 | 特殊設計が必要 | 特殊設計が必要 |
| 速度範囲 | < 300 mm/s | > 1000 mm/s | 100-500 mm/s |
| 連続推力 | 0.4-10 N | 10-1000+ N | 1-50 N |
圧電モーターが電磁モーターを凌駕する領域
分解能。 圧電超音波モーターは1 nm以下の分解能を達成します。DCサーボモーターは50500 nm、ステッピングモーターは110 umが典型的です。
静止時保持力。 圧電モーターは電力ゼロで位置を保持します。DCサーボは連続通電が必要であり、その間発熱と電力消費が続きます。
バックラッシュ。 圧電モーターはゼロです。ギアを使用するDCサーボやステッパーでは、ギアの精度に依存したバックラッシュが避けられません。
磁場放射。 圧電モーターは磁場を一切発生しません。電磁モーターは本質的に磁場を放射するため、電子ビーム装置やMRI周辺、高感度センサー近傍では使用が困難です。
真空適合性。 圧電モーターは本質的に真空対応です。潤滑油、ブラシ、コイル被覆といった真空で問題となるコンポーネントが存在しません。電磁モーターは真空対応版として特別設計が必要です。
電磁モーターが優位な領域
速度。 圧電モーターの最大速度は300 mm/s程度です。DCサーボやリニアモーターは1,000 mm/s以上に達します。
連続推力。 圧電モーターの推力は0.410 N程度です。電磁リニアモーターは101,000 N以上を発生できます。
この特性を理解することが、正しい技術選定の第一歩です。
動作エンベロープ
超音波圧電モーターは、精密モーション技術の中で特定の領域を占めています。以下の条件に該当する用途で、圧電モーターは最大の優位性を発揮します。
- サブミクロンからナノメートル級の位置決め精度が必要な場合
- ゼロバックラッシュ、ダイレクトドライブ(ギアボックスなし)が求められる場合
- 再設計なしで真空またはクリーンルーム環境に対応する必要がある場合
- 磁場放射ゼロが必須の場合(電子ビーム、MRI、高感度センサー周辺)
- 高い剛性対サイズ比を備えたコンパクトなフォームファクターが必要な場合
- 電力消費や発熱なしに位置を保持する必要がある場合
一方、以下の条件では圧電モーターは最適な選択ではありません。
- 高い連続速度(300 mm/s超)が必要な場合
- 高い連続推力(1軸あたり10 N超)が必要な場合
- 長ストロークの等速走査を高スループットで行う場合
これらの用途では、ボイスコイルモーター、リニアサーボモーター、アイアンレスダイレクトドライブモーターがより適した選択肢となります。各技術との詳細な比較は、サーボモーターとの比較、ステッピングモーターとの比較、ボイスコイルとの比較をご参照ください。
モーターからステージへ
モーターエレメント単体で使用されることはまれです。完成したステージでは、モーターエレメントに以下のコンポーネントが統合されます。
- ベアリング: クロスローラーベアリング、空気軸受、またはフレキシャー。用途に応じた剛性と真空対応性で選定されます。
- エンコーダー: 光学式または静電容量式。分解能は5 nmから、最も要求の厳しい用途では0.1 nmまで対応します。
- コントローラー: PIDまたはより高度なアルゴリズムによる閉ループサーボ制御。更新レートは10~50 kHzです。
- プリロード機構: バネまたはフレキシャーにより、モーターフィンガーとレール間の最適接触力を維持します。
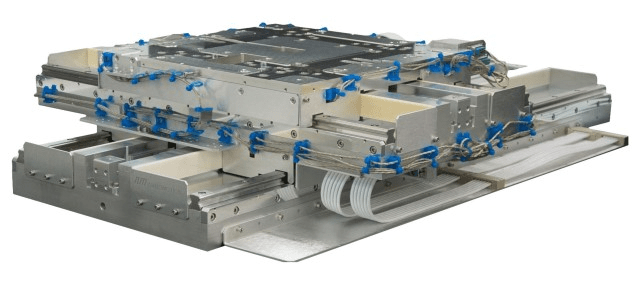 複数の圧電モーターエレメントを搭載した精密XYステージ。このようなステージは、半導体ウェーハ検査においてサブナノメートルの繰り返し精度を実現します。画像提供:Nanomotion Ltd.
複数の圧電モーターエレメントを搭載した精密XYステージ。このようなステージは、半導体ウェーハ検査においてサブナノメートルの繰り返し精度を実現します。画像提供:Nanomotion Ltd.
コントローラーはエンコーダーからの位置フィードバックを受け取り、指令位置との偏差を計算して駆動信号を補正します。この閉ループ制御により、モーター自体の非線形性(摩擦、ヒステリシス、温度変動)を補償し、サブナノメートルの位置決め精度を達成します。閉ループ制御の詳細については、閉ループ制御の記事で解説しています。
次に読むべき記事
本記事では超音波圧電モーターの動作メカニズムを概観しました。「基礎知識」シリーズの次の記事では、各側面をさらに掘り下げます。
- 圧電効果: 結晶物理、d33係数、PZT材料特性の詳細
- 共振周波数とステーター設計: モーターの動的応答を決定するパラメータ
- 閉ループ制御: エンコーダー選定とサーボチューニングの実践
技術選定を進めている方には、「技術比較」セクションで圧電モーターとボイスコイル、サーボ、ステッピングモーターのヘッドトゥーヘッド比較と、用途別の選定ガイダンスを提供しています。技術比較の概要はこちらをご覧ください。