技術比較
荷重・ストローク・分解能のトレードオフを理解する
力、ストローク、精度の全てに同時に優れる単一アクチュエータが存在しない根本的な物理法則
アクチュエータ技術間における荷重・ストローク・分解能のトレードオフ
あらゆるアクチュエータ技術は、荷重・ストローク・分解能の三次元空間において限られた領域を占める。3つのパラメータすべてに同時に優れる技術は存在せず、その制約は基礎物理に根差しており、設計上の妥協ではない。圧電スタックは驚異的な剛性とサブナノメートルの分解能を実現するが、可動域はマイクロメートル単位に制限される。サーボモータは数百ミリメートルをキロニュートンの力で駆動するが、特段の工夫なしにマイクロメートル以下を分解することはできない。ボイスコイルはミリメートルのストロークにわたってナノメートル級の位置決めを可能にするが、より大きな力を要求すると熱の壁に突き当たる。
これらの境界は設計の不備によるものではなく、材料特性、熱力学、信号対雑音比の帰結である。この事実を理解することが、適切に機能するシステムを仕様化することと、実現不可能なシステムを仕様化することの分かれ目となる。エンジニアが要件書に「200 mm可動域、10 nm分解能、500 N連続力」と書いた場合、ほぼ確実に単一ステージでは実現不可能なシステムを記述している。この事実を早期に認識し、要件を実現可能なサブシステムに分解する方法を身につけることが、本稿の主題である。
本稿では、6つのアクチュエータファミリー(圧電スタック、増幅型圧電アクチュエータ、圧電モータ、ボイスコイルアクチュエータ、サーボおよびリニアモータ、ステッパーモータ)の性能境界をマッピングする。さらに、多くのアクチュエータを案内するフレクシャ機構、単一技術の限界を超えるマルチステージアーキテクチャ、技術選択のための実用的な経験則についても解説する。
三者間トレードオフ
荷重・ストローク・分解能の制約は「三つのうち二つを選べ」と表現されることがある。この表現は物理を単純化しすぎてはいるが、直感としては正しい。
高力 + 長ストローク = 低分解能。 大きな荷重を長距離にわたって移動させるには大きなエネルギー伝達が必要であり、発熱、振動、そして比例的に大きな誤差源を持つ大型機械構造を伴う。ボールねじにはバックラッシュとピッチ誤差が生じる。リニアモータは相当な電磁ノイズを発生する。長いガイドウェイの熱膨張がドリフトを生む。
高分解能 + 長ストローク = 低力。 センチメートル単位の可動域でナノメートル精度を維持するには、エアベアリング、干渉計エンコーダ、花崗岩ベース、除振機構が必要となる。結果として得られるシステムは大型で高価であり、構造剛性が低い。力容量は温度感度とベアリング剛性によって制限される。
高力 + 高分解能 = 短ストローク。 圧電スタックはキロニュートンの力とピコメートルの分解能を実現するが、可動域はマイクロメートル単位に限られる。セラミックのひずみ限界が、アクチュエータ長さに対する変位の絶対的な上限を設定する。
この三者間制約は、巧みな設計で克服できるエンジニアリング上の限界ではない。熱力学(発熱は力と速度の積に比例する)、材料科学(ひずみ限界、線膨張係数)、情報理論(センサとドライバの信号対雑音比)の帰結である。過去50年間に発見されたすべての新アクチュエータ技術は同じ有限のエンベロープ内に収まっており、その中の異なる領域を占めているにすぎない。
パラメータの各ペアには、境界を生む固有の物理的メカニズムがある。仕様表を暗記するのではなく、これらのメカニズムを理解することで、新しいアクチュエータ技術を迅速に評価し、メーカーの仕様が物理的に妥当な範囲を超えた性能を主張していないかを見極めることができる。
圧電スタックアクチュエータ
最もシンプルな圧電アクチュエータは、電圧印加時に各層が伸長するPZTセラミック層の積層体である。物理は単一の式で支配される。
delta_L = d33 x V x N
ここで、d33は圧電電荷係数、Vは印加電圧、Nは層数である。PZT-5Aのd33は約390 pm/V、PZT-5Hのd33は約593 pm/Vである。新世代のPMN-PT単結晶はd33で2000 pm/Vに達するが、大幅に高いコストと温度感度により実用面での制約がある。
スタックアクチュエータの総自由変位量は、アクチュエータの物理長さの約0.1%から0.15%に制限される。これは設計パラメータではなく材料のひずみ限界である。10 mmのスタックは10から15マイクロメートルを生成する。100 mmのスタックは100から150マイクロメートルを生成する。ベアスタックから1 mmのストロークを得るには約700 mmのスタックが必要となり、脆弱で高価であり、実用的でない低い周波数で共振する。
拘束力と荷重線
圧電スタックの拘束力は、変位が完全に拘束された状態で発生しうる最大力であり、スタック剛性と自由変位の積に等しい。
F_block = k_stack x delta_L_free
PI PICMA P-885.55は広く使用されるコンパクトな多層アクチュエータで、自由変位14マイクロメートル、拘束力850 N、剛性約50 N/マイクロメートルを備える。共振周波数は約60 kHzで、キロヘルツ帯域のダイナミックアプリケーションに適する。
より大型のP-888.55は断面積の増大による剛性の向上で、同一ストロークを維持しつつ拘束力を3,400 Nまで高めている。PICA Powerシリーズは広範囲をカバーし、5から180マイクロメートルのストロークで1,200 Nから70,000 Nの拘束力を提供する。
予圧型設計のP-242およびP-246シリーズは、最大120マイクロメートルのストロークで30,000 Nの押し力と3,500 Nの引き力を実現する。引き力を可能にする予圧ばねは慎重に選定する必要がある。ばね剛性が圧電スタック剛性の約10%を超えると、予圧が利用可能な変位の相当部分を消費してしまう。
荷重下での実用的な出力変位は線形荷重線に従う。外部剛性が増加すると出力変位は線形的に減少する。外部剛性が圧電剛性と等しい場合、出力変位は半減し、出力力は拘束力の半分となる。この荷重線の挙動は、圧電が押す対象すべて(ワークピース、取付構造、予圧機構)の剛性を考慮する必要があることを意味する。
 PI PICMA多層スタックアクチュエータ。共焼成セラミック構造がサブナノメートル分解能、キロニュートンの拘束力、数十キロヘルツの帯域幅を提供する。ストロークはアクチュエータ高さの約0.1%でスタック長に比例して拡大する。出典: PI
PI PICMA多層スタックアクチュエータ。共焼成セラミック構造がサブナノメートル分解能、キロニュートンの拘束力、数十キロヘルツの帯域幅を提供する。ストロークはアクチュエータ高さの約0.1%でスタック長に比例して拡大する。出典: PI
圧電スタックが優位な領域: ストローク200マイクロメートル以下、分解能1 nm以下、剛性10 N/マイクロメートル以上、帯域幅1 kHz以上。この領域で他のアクチュエータ技術が競合することはない。
増幅型圧電アクチュエータ
機械的増幅(通常はフレクシャレバー機構)は、力をストロークと交換する。これは無料ではなく、厳格なスケーリング則に従う。増幅倍率をAとすると:
- ストロークはA倍に増加
- 拘束力はA分の1に減少
- 剛性はAの2乗分の1に減少
- 共振周波数は約sqrt(A)分の1に減少
力・ストローク積は、所定のアクチュエータシェルサイズに対してほぼ保存される。すなわち、エネルギーを力と変位の間で再配分することはできるが、より大きなアクチュエータなしにどちらも増やすことはできない。
Cedrat APAシリーズ
Cedrat Technologiesは最も充実した増幅型圧電アクチュエータのラインナップを製造しており、増幅のトレードオフを明確に示している。
| モデル | 自由ストローク (um) | 拘束力 (N) | 剛性 (N/um) | 共振周波数 (Hz) | 力 x ストローク (N-um) |
|---|---|---|---|---|---|
| APA30uXS | 34 | 3.7 | 0.11 | 4,800 | 126 |
| APA60ML | 65 | 3,300 | 51 | 2,600 | 214,500 |
| APA300ML | 300 | 540 | 1.8 | 760 | 162,000 |
| APA2000L | 2,000 | 62 | 0.031 | 87 | 124,000 |
この表からいくつかのパターンが浮かび上がる。APA30uXSとAPA2000Lは力とストロークの配分が大きく異なるにもかかわらず、力・ストローク積はほぼ同等(約125,000 N-um)である。APA2000Lは2 mmの可動域を達成し、ボイスコイルアクチュエータや圧電モータの領域に近づくが、拘束力はわずか62 Nで剛性は0.031 N/マイクロメートル。P-885.55のような素のスタック(剛性50 N/マイクロメートル)と比較すると、APA2000Lの剛性は約1,600分の1である。
共振周波数にも同様のことが言える。APA30uXSは4,800 Hzで共振し、キロヘルツ級の帯域幅を提供する。APA2000Lは87 Hzで共振し、実用的な帯域幅は20から30 Hz程度に制限される。高速スキャンや振動制御では、長ストローク増幅型設計は単純に遅すぎる。
中間のAPA60MLは注目に値する。大きなスタックの控えめな増幅により、65マイクロメートルのストロークと2,600 Hzの共振周波数で、相当な力(拘束力3,300 N)と剛性(51 N/マイクロメートル)を維持している。
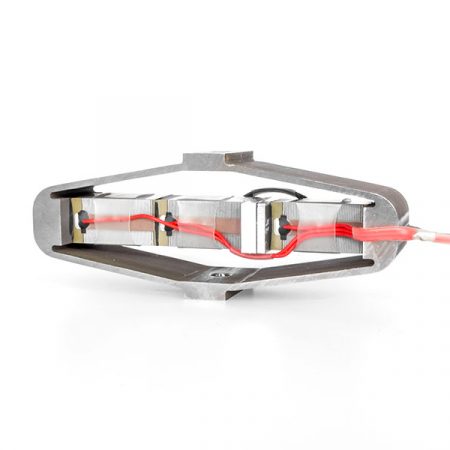 Cedrat APA300ML増幅型圧電アクチュエータ。ダイヤモンド形フレクシャシェルが、内部スタックの15マイクロメートルの変位を300マイクロメートルの出力ストロークに変換する。力・ストロークのトレードオフが明白である。拘束力540 N(素のスタックの3,400 Nに対して)で20倍の可動域を実現。出典: Cedrat Technologies
Cedrat APA300ML増幅型圧電アクチュエータ。ダイヤモンド形フレクシャシェルが、内部スタックの15マイクロメートルの変位を300マイクロメートルの出力ストロークに変換する。力・ストロークのトレードオフが明白である。拘束力540 N(素のスタックの3,400 Nに対して)で20倍の可動域を実現。出典: Cedrat Technologies
増幅型圧電が優位な領域: ストローク50から500マイクロメートル、中程度の力(100から1,000 N)と帯域幅(100から1,000 Hz)が許容される場合。光学マウントのアクティブ振動制御、補償光学、ダイヤモンド旋盤のファストツールサーボが典型的なアプリケーションである。
圧電モータ: 超音波、スティックスリップ、ウォーキング
圧電モータはスタックのストローク限界から完全に解放される。変位をマイクロメートル単位で機械的に拡大するのではなく、超音波周波数の圧電振動を摩擦接触によって連続的なリニアまたは回転運動に変換することで、原理的に無制限のストロークを実現する。
三つの主要なアーキテクチャが存在する。超音波モータは進行波または定在波を用いて20から200 kHzの摩擦接触を駆動する。スティックスリップモータは静摩擦と動摩擦の差を利用してランナーをナノメートル単位のステップで前進させる。ウォーキングモータ(PI NEXLINEシリーズなど)は、生物の歩行に類似した機構で、複数の圧電脚がグリップ、プッシュ、リリースの連携動作を繰り返して駆動する。
分解能
圧電モータの分解能は接触ダイナミクスと制御アーキテクチャによって決まる。各「ステップ」には接触剛性、予圧、表面状態で決まる最小増分がある。典型的な最小増分運動は、最良のウォーキング設計で1 nmから、単純なスティックスリップデバイスで100 nmの範囲である。ステッパーやサーボモータのシステムよりはるかに優れているが、素の圧電スタックよりは粗い。
力
力はモータタイプによって大きく異なる。Nanomotion Edgeモータは約0.35 Nの連続力を発生させ、軽量光学部品の位置決めに適する。これに対し、PI N-216 NEXLINEウォーキングモータは最大600 Nを発生する。この両端の間で、ほとんどの超音波リニアモータは1から50 Nを提供する。
速度
速度も広い範囲にわたる。PI NEXACTシリーズは精度と力に最適化され約10 mm/sに達する。Xeryon XLSシリーズは速度に最適化され最大1,000 mm/sを達成する。汎用圧電モータステージの多くは100から400 mm/sで動作する。
シフトしたトレードオフ
無制限のストロークが利用可能となるため、圧電モータのトレードオフは力・ストローク・分解能から力・速度・摩耗率へとシフトする。高い力にはより高い摩擦接触の予圧が必要であり、摩耗が増加する。高い速度は毎秒あたりの摩擦サイクル数を増やし、同様に摩耗を増加させる。接触面(通常はアルミナセラミック)には累積走行距離で数千キロメートルの有限寿命がある。中程度のデューティサイクルのアプリケーション(連続スキャンではなく位置決め)では、摩耗が実用上の問題になることはほとんどない。高デューティのスキャンアプリケーションでは、接触寿命がシステムレベルの設計パラメータとなる。
圧電モータが優位な領域: ミリメートルからセンチメートルのストローク、サブマイクロメートル分解能、ゼロ電力保持、コンパクトな形状、磁界放射なし。詳細な比較は圧電対サーボおよび圧電対ボイスコイルを参照。
ボイスコイルアクチュエータ
ボイスコイルアクチュエータはローレンツ力の原理で動作する。
F = k x B x L x I x N
ここで、Bは磁束密度、Lは磁界中の導体長、Iは電流、Nは巻数、kは形状依存の定数である。消費電力の平方根あたりの力を表すモータ定数Kmが重要な性能指標となる。重要な点として、Kmはストローク長に反比例する。磁気ギャップが長くなると、平均磁界が弱くなるか磁石質量が増加する。
代表的な製品
H2W Technologies NCC08-75-3000-3Xは20 mmストローク、1,330 N連続力、4,000 Nピーク力の高性能ボイスコイルである。ピーク力と連続力の3:1の比は典型的であり、熱限界を反映している。ピーク力はコイルが過熱するまでの短時間しか維持できない。
BEI Kimcoは最大100 mmストローク、連続力1,000 Nまでのボイスコイルを製造している。約150 mmを超えるストロークでは、磁気ギャップ長、磁石質量、コイル質量がすべて増大し力密度が著しく低下するため、ボイスコイル設計は実用的でなくなる。
力の一定性
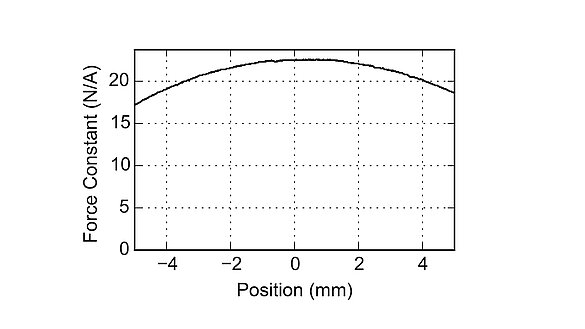
ボイスコイルの重要な利点は、ストロークにわたる力の一定性である。コイルが均一磁界中を移動するため、力/電流比は全可動域にわたって約5%以内で一定を維持する。これにより、定力付加が必要なアプリケーション(アクティブ除振、精密荷重試験など)に最適となる。
分解能
ボイスコイルの分解能は電流ノイズと位置センサによって制限される。低ノイズ電流アンプと静電容量式または干渉計式位置センサを組み合わせれば、100 nmの分解能は日常的に達成でき、慎重に設計されたシステムでは10 nm以下に到達可能である。ただし、そのためには外部位置センサ(ボイスコイルには固有の位置フィードバックがない)と高帯域サーボループが必要となる。
熱的限界
ボイスコイルの主要な力の上限は熱である。力は電流に比例し、発熱は電流の二乗に比例する。連続力を倍にするには4倍の冷却能力が必要となる。このI^2R関係が急峻な実用的境界を生む。高い力定格のボイスコイルは物理的に大きく、アクティブ冷却を必要とし、高価である。
ムービングコイルとムービングマグネット
ボイスコイルアクチュエータには二つのトポロジーがある。ムービングコイル型は磁石アセンブリを固定しコイルを移動させるため、可動質量を最小化するがコイルリード線のフレキシブルケーブル管理が必要となる。ムービングマグネット型はコイルを固定し磁石アセンブリを移動させるため、ケーブル配線は簡素化されるが可動質量が増加する(磁石は重い)。アクティブ除振のような高帯域アプリケーションではムービングコイル型の低い可動質量が好まれる。ケーブル配線が重要な場合やコイルの発熱がペイロード近傍で許容できない場合はムービングマグネット型が適切である。
 PIのボイスコイルアクチュエータおよびステージ。力は電流に比例しコギングがゼロであるため、定力アプリケーションに最適。連続電流の熱ペナルティ(I^2R発熱)が力の上限とデューティサイクルを制限する。出典: PI
PIのボイスコイルアクチュエータおよびステージ。力は電流に比例しコギングがゼロであるため、定力アプリケーションに最適。連続電流の熱ペナルティ(I^2R発熱)が力の上限とデューティサイクルを制限する。出典: PI
ボイスコイルが優位な領域: 短ストローク(1から50 mm)で力の一定性、高速整定、中程度の分解能が必要なアプリケーション。オートフォーカス機構、ハードディスクヘッド位置決め、アクティブ除振、精密力付加。
サーボモータとリニアモータ
回転サーボ+ボールねじ
回転サーボモータと精密ボールねじの組合せは産業用モーション制御の主力である。ねじが機械的利点を提供し、1 Nmのトルクをピッチ5 mmのねじで約1,100 Nのリニア力に変換する。この力の増幅には分解能の対応するペナルティが伴う。
ボールねじの誤差源にはバックラッシュ(通常1から20マイクロメートル、予圧ナットでゼロ近くまで低減可能)、累積ピッチ誤差(精密級ねじで300 mmあたり3から10マイクロメートル)、荷重下の弾性コンプライアンスが含まれる。これらの誤差がロータリーエンコーダ使用時の実用的な分解能フロアを0.5から5マイクロメートルに設定する。
移動プラットフォームにリニアエンコーダを追加すればねじ誤差をバイパスするが、バックラッシュは排除されない(コントローラがリニアエンコーダ信号を用いて能動的に補償しない限り)。Newport ILS250CCは250 mmストロークで0.1マイクロメートル分解能をリニアエンコーダで実現する。PI M-230シリーズはクロスローラーベアリングと補間エレクトロニクス付きリニアエンコーダで70 Nの力にわたって0.05マイクロメートルの最小増分運動を達成する。
ダイレクトドライブリニアモータ
ダイレクトドライブリニアモータはボールねじを完全に排除し、バックラッシュ、ピッチ誤差、カップリングコンプライアンスを誤差バジェットから除去する。モータのフォーサが磁石トラックに沿って直接移動し、位置は同一構造に取り付けられたリニアエンコーダで測定される。
Aerotech PRO165LMはこの技術の最高峰を例示する。1,500 mmの可動域、5 nmの最小増分運動、2 m/sのピーク速度で、エアベアリングと精密花崗岩ベースを備える。Aerotech BLMXシリーズは重荷重アプリケーション向けに最大4,252 Nのピーク力を提供する。
二つのモータトポロジーが主流である。アイアンコア設計は磁束を集中させる積層鉄ステータを使用し、高い力密度を実現するがコギング(力リップル)とフォーサと磁石トラック間の吸引力を導入する。アイアンレス(エアコア)設計はコギングと吸引力を排除するが、力密度が低くニュートンあたりのコストが高い。BLMX(アイアンコア)のピーク力は4,252 N、BLMH(アイアンレス)のピーク力は2,195 N。滑らかな速度とナノメートル位置決めを要求するアプリケーションでは、低い力にもかかわらずアイアンレスモータが強く推奨される。
リニアモータの主要な力の上限も熱である。500 Nの連続力を発生するフォーサは300から800 Wの熱を放散する可能性があり、液冷ジャケットが必要となる。このため、連続力定格は特定の冷却条件(自然対流、強制空冷、液冷)で規定される。
 PI V-508アイアンレスリニアモータステージ。ダイレクトドライブによりボールねじ誤差を排除し、数百ミリメートルにわたってサブマイクロメートル分解能を実現。アイアンレス設計により滑らかなスキャンのためのゼロコギングを提供。出典: PI
PI V-508アイアンレスリニアモータステージ。ダイレクトドライブによりボールねじ誤差を排除し、数百ミリメートルにわたってサブマイクロメートル分解能を実現。アイアンレス設計により滑らかなスキャンのためのゼロコギングを提供。出典: PI
ダイレクトドライブリニアモータが優位な領域: 長ストローク(100 mmから3,000 mm)、高速(100 mm/s以上)、高分解能(1マイクロメートル以下)を同時に実現。半導体リソグラフィステージ、フラットパネル検査、精密レーザ加工、三次元測定機。
ステッパーモータ
ステッパーモータは、運動が固有に量子化されているという点で、本稿で取り上げる他の技術とは根本的に異なる。典型的な1.8度ステッパーは1回転あたり200フルステップを持つ。ピッチ2 mmのリードスクリューでは、各フルステップは10マイクロメートルのリニア運動を生じる。マイクロステッピングにより各フルステップを電気的に細分化でき、市販ドライバは1ステップあたり256マイクロステップ(ピッチ2 mmのリードスクリューで12.8マイクロメートル/マイクロステップ)を提供する。
マイクロステッピング分解能の誤解
実際には、マイクロステッピング精度は細かい分割レベルで急速に劣化する。モータの磁気的非理想性、巻線抵抗のばらつき、ディテントトルクが、マイクロステップサイズの減少に伴い増大する位置誤差を生じさせる。1/256マイクロステッピングでは、実際のステップサイズが理論値から50%から200%変動する可能性がある。詳細は圧電対ステッパー比較で議論している。ステッパーモータシステムの実用的な最小増分運動は、微細ピッチリードスクリューと閉ループフィードバックで1から5マイクロメートル、開ループで5から20マイクロメートルである。
トルク・速度特性
ステッパーモータは速度の増加に伴い急激なトルク低下を示す。NEMA 17ステッパーで低速時に0.4 Nmのものは1,000 RPMではわずか0.1 Nmしか出力できない可能性がある。NEMA 23ステッパーで定格保持トルク1.8 Nmのものでも1,000 RPMでは0.4 Nm程度となりうる。このトルク・速度特性はモータのインダクタンスとドライバの電圧供給に起因する根本的な帰結である。
リードスクリューを介したリニア運動では、これは並進速度が高くなると利用可能な力が急激に低下することを意味する。NEMA 23ステッパーとピッチ5 mmのねじの組合せでは、低速時に約2,000 Nだが100 mm/sでは500 N程度となる。
閉ループステッパー
ステッパーシステムにリニアエンコーダを追加しフィードバックループを閉じることで位置精度を大幅に向上できるが、根本的な分解能限界は克服されない。エンコーダはステップ脱落、熱ドリフト、バックラッシュを検出・補正するが、モータの最小制御可能な力増分(マイクロステップ電流粒度とディテントトルクで設定)により最小増分運動は約1マイクロメートルに制限される。閉ループステッパーシステムは低コストと位置フィードバックの信頼性を組み合わせてラボ自動化でますます普及しているが、サーボ級の性能と混同すべきではない。
ステッパーが優位な領域: 5マイクロメートル以上の分解能で可能な限り低コスト。ラボ自動化、3Dプリンティング、CNCルーティング、サンプルハンドリング、軸あたり$500以下のコストが極限精度より重要なアプリケーション全般。
 圧電アクチュエータの力・変位(荷重線)図。動作点は対角線に沿って移動する。ゼロ力で最大変位(自由ストローク)、ゼロ変位で最大力(拘束力)。外部荷重剛性がこの線上のどこでシステムが動作するかを決定する。出典: PI
圧電アクチュエータの力・変位(荷重線)図。動作点は対角線に沿って移動する。ゼロ力で最大変位(自由ストローク)、ゼロ変位で最大力(拘束力)。外部荷重剛性がこの線上のどこでシステムが動作するかを決定する。出典: PI
フレクシャ機構: ガイドのトレードオフ
多くの精密アクチュエータ(圧電スタック、ボイスコイル、増幅型圧電)は転がり軸受ではなくフレクシャ機構を使用して運動を案内する。フレクシャはゼロバックラッシュ、ゼロ摩擦、ゼロ摩耗、無限寿命を提供するが、システム全体を制約する独自の力・ストロークトレードオフを課す。
支配方程式
長さL、幅b、厚さhの単純片持ちフレクシャ(弾性率E、降伏応力sigma_yieldの材料)の場合:
剛性: k = E x b x h^3 / (4 x L^3)
最大可動量: delta_max ~ sigma_yield x L^2 / (E x h)
この二つの式がフレクシャの根本的なトレードオフを示す。剛性はhの3乗に比例しLの3乗に反比例する。最大可動量はLの2乗に比例しhに反比例する。剛性と可動量を独立に指定することはできない。剛性を高める(より厚く短い梁)と最大可動量が直接減少する。可動量を増やす(より薄く長い梁)と剛性と耐荷重性が直接減少する。
共振周波数
質量mを搭載するフレクシャガイドステージの共振周波数は:
f_res = (1 / 2pi) x sqrt(k / m)
可動量が増加すると剛性が低下し、共振周波数が下がる。50マイクロメートルの可動量を持つフレクシャステージの共振は5 kHzかもしれないが、1,800マイクロメートルにスケーリングした同じ基本設計では200 Hz程度となる。この帯域幅の低下が制御ループの速度と整定時間を直接制限する。
材料選定
ベリリウム銅(BeCu)は高い降伏強度(1,000から1,200 MPa)、適度な弾性率(130 GPa)、優れた疲労寿命、良好な加工性を兼ね備えるため、ほとんどの精密ステージで好まれるフレクシャ材料である。チタン合金(Ti-6Al-4V)は強度/弾性率比が優れ、所定の剛性でより大きな可動量を提供するため、最も要求の厳しいアプリケーションに使用される。ステンレス鋼は低コストの代替材だが、フレクシャ設計にとって機械的特性は不利である。
市販フレクシャステージ
PI PIHeraシリーズの圧電フレクシャステージは50から1,800マイクロメートルの可動域にわたり、静電容量センサフィードバックと0.1 nm分解能を全範囲で提供する。短可動域の変種(50から100マイクロメートル)は2 kHz以上の共振周波数と5 N/マイクロメートル以上の剛性を持つ。1,800マイクロメートル変種は200 Hz付近の共振周波数と0.5 N/マイクロメートル以下の剛性を持つ。
Aerotech QNPシリーズはフレクシャステージ市場の高精度端を対象とし、100から600マイクロメートルの可動域で0.15 nm分解能を実現する。XY構成で885 Hzの共振周波数を達成しており、多軸設計としては注目に値する。
フレクシャのトレードオフは不可避である。追加の可動域1ミリメートルごとに剛性、帯域幅、耐荷重性を消費する。圧電フレクシャステージが最高分解能のアクチュエータ技術を使用しているにもかかわらず、単軸ステージで約2 mmの実用的な可動域上限を持つのはこのためである。それを超えると、フレクシャは有意な荷重を支えたり有意な帯域幅を維持するには柔らかくなりすぎる。
性能エンベロープマップ
以下の表は全アクチュエータ技術にわたる性能境界を総合的に示す。これらは理論的限界ではなく商業的に実証された性能を表す。特定アプリケーションの実システムではこれらの範囲を外れる(良い方にも悪い方にも)可能性があるが、これらの境界は確実に仕様化・購入できる範囲を表す。
力 vs. ストローク比較
| 技術 | ストローク範囲 | 力範囲 (連続) | 剛性 | 帯域幅 (Hz) |
|---|---|---|---|---|
| 圧電スタック (素) | 5~180 um | 850~70,000 N | 15~500 N/um | 5,000~60,000 |
| 圧電スタック (予圧) | 60~120 um | 3,500~30,000 N (押し) | 50~400 N/um | 2,000~15,000 |
| 増幅型圧電 | 34~2,000 um | 3.7~3,300 N | 0.03~51 N/um | 87~4,800 |
| 圧電モータ (超音波) | 5~200 mm | 0.35~50 N | N/A (摩擦保持) | DC~1,000 (速度依存) |
| 圧電モータ (ウォーキング) | 5~50 mm | 10~600 N | 高 (クランプ状態) | DC~100 |
| ボイスコイル | 0.1~100 mm | 0.5~1,330 N | 0 (固有剛性なし) | DC~5,000 |
| サーボ+ボールねじ | 10~3,000 mm | 50~50,000 N | 20~200 N/um (ねじ依存) | DC~200 |
| ダイレクトドライブリニア (アイアンコア) | 10~3,000 mm | 50~4,252 N (ピーク) | 0 (固有剛性なし) | DC~1,000 |
| ダイレクトドライブリニア (アイアンレス) | 10~3,000 mm | 10~2,195 N (ピーク) | 0 (固有剛性なし) | DC~2,000 |
| ステッパー+リードスクリュー | 10~1,000 mm | 100~10,000 N (低速時) | 5~50 N/um | DC~50 |
分解能 vs. ストローク比較
| 技術 | ストローク範囲 | 分解能 (閉ループ) | 分解能 (開ループ) |
|---|---|---|---|
| 圧電スタック | 5~180 um | 0.05~0.5 nm | 1~10 nm (チャージ駆動) |
| 増幅型圧電 | 34~2,000 um | 0.5~5 nm | 5~50 nm |
| 圧電フレクシャステージ | 50~1,800 um | 0.1~1 nm | N/A (常に閉ループ) |
| 圧電モータ | 5~200 mm | 1~100 nm | 30~500 nm |
| ボイスコイル | 0.1~100 mm | 1~100 nm | N/A (常にフィードバック必要) |
| サーボ+ボールねじ | 10~3,000 mm | 50~5,000 nm | N/A (ロータリーエンコーダ: 500~50,000 nm) |
| ダイレクトドライブリニア | 10~3,000 mm | 1~100 nm | N/A (常に閉ループ) |
| ステッパー+リードスクリュー | 10~1,000 mm | 1,000~5,000 nm | 5,000~50,000 nm |
力 vs. 分解能比較
| 技術 | 分解能 | 力 | 主要制約 |
|---|---|---|---|
| 圧電スタック | 0.05~1 nm | 850~70,000 N | ストロークが200 um以下に制限 |
| 増幅型圧電 | 0.5~5 nm | 3.7~3,300 N | 増幅で剛性が低下 |
| 圧電フレクシャステージ | 0.1~1 nm | 5~50 N (ステージ容量) | 可動域が2 mm以下に制限 |
| 圧電モータ | 1~100 nm | 0.35~600 N | 摩擦接触が両方を制限 |
| ボイスコイル | 1~100 nm | 0.5~1,330 N | 力に対する熱制限 |
| ダイレクトドライブリニア | 1~100 nm | 50~4,252 N | 熱制限、冷却が必要 |
| サーボ+ボールねじ | 50~5,000 nm | 50~50,000 N | ねじ誤差が分解能を制限 |
| ステッパー+リードスクリュー | 1,000~50,000 nm | 100~10,000 N | ステップの量子化 |
 PI PICA圧電スタックアクチュエータ。スタック長が最大ストロークを直接決定(長さの0.1%から0.15%)し、断面積が拘束力を決定する。最小スタックは数千ニュートンでマイクロメートルの可動域を提供。最大スタックは数万ニュートンで180マイクロメートルに到達。出典: PI
PI PICA圧電スタックアクチュエータ。スタック長が最大ストロークを直接決定(長さの0.1%から0.15%)し、断面積が拘束力を決定する。最小スタックは数千ニュートンでマイクロメートルの可動域を提供。最大スタックは数万ニュートンで180マイクロメートルに到達。出典: PI
複数段が必要な場合: マルチステージアーキテクチャ
性能エンベロープマップは重要なギャップを示す。以下の条件を同時に満たす単一ステージ技術は存在しない。
- ストローク1 mm以上
- 分解能10 nm以下
- 力100 N以上
アプリケーションがこのギャップの性能を要求する場合、ほぼ常にマルチステージ(粗動/微動)アーキテクチャが解答となる。これは回避策ではなく、物理に基づく解決策である。半導体リソグラフィ(存在する最も要求の厳しい精密モーションアプリケーション)は1980年代からマルチステージアーキテクチャを使用してきた。
アーキテクチャ
マルチステージシステムは長ストロークの「粗動」ステージと、その上に搭載される短ストロークの「微動」ステージを組み合わせる。粗動ステージはペイロードを微動ステージのキャプチャ範囲内に位置決めする。微動ステージはナノメートルまたはサブナノメートルの精度で最終位置決めを行う。
**粗動ステージ(サーボモータ、200 mmストローク、1 um位置決め)**は微動ステージとペイロードを全作業範囲にわたって搬送する。その位置決め精度は最終精度仕様ではなく微動ステージの可動域内に収まればよい。
**微動ステージ(圧電フレクシャ、100から600 um可動域、サブナノメートル分解能)**は最終位置決めを行う。その可動域は粗動ステージの最悪ケース位置決め誤差を超えなければならない。
制御アーキテクチャ: デュアルサーボループ
二つのステージには協調制御が必要である。最もシンプルなアプローチはカスケードループを使用する。外側(粗動)ループが位置決め誤差を微動ステージ範囲内に低減し、内側(微動)ループが最終位置決めを引き受ける。より洗練されたアーキテクチャでは双入力単出力(DISO)制御を使用し、両ステージが同時にコマンドを受け取る。粗動ステージが低周波・大振幅成分を処理し、微動ステージが高周波・小振幅成分を処理する。
帯域分離が重要である。粗動ステージのサーボ帯域幅は50 Hz程度、微動ステージは500 Hzから2 kHzかもしれない。粗動から微動に制御権限が移行するクロスオーバー周波数は、不安定性を避けるために慎重に設計しなければならない。
実証された性能
マルチステージアーキテクチャは、ボールねじ粗動ステージと圧電フレクシャ微動ステージの組合せで200 mmの可動域にわたって10 nm位置決め精度を実証している。ボールねじが2マイクロメートル以内に位置決めし、圧電ステージが0.5 nm分解能で残余誤差を補正する。
半導体リソグラフィでは、ウェーハステージがリニアモータ粗動ステージ、圧電微動ステージ、6軸アクティブアライメントシステムの組合せで300 mmウェーハ径にわたってサブナノメートルのオーバーレイ精度を達成している。これらは数百万ドル規模の工学的投資を要するが、マルチステージ原理が最も要求の厳しいアプリケーションにスケールすることを実証している。重要な知見は、マルチステージアーキテクチャは技術の限界に起因する妥協ではなく、物理に照らして最適な解決策であるということである。仮に全性能範囲をカバーできる仮想の単一ステージアクチュエータが存在したとしても、適切に設計された粗動/微動組合せより効率が低く、信頼性が低く、高価になる可能性が高い。特化型ステージはそれぞれの動作レジームに個別最適化できるためである。
一般的なマルチステージの組合せ
サーボ(粗動) + 圧電フレクシャ(微動): 最も一般的な産業用組合せ。サーボボールねじが100 mm以上のストロークで1から5マイクロメートルの位置決めを提供。圧電フレクシャステージ(サーボキャリッジ上に搭載)が50から600マイクロメートルの微動とサブナノメートル分解能を提供。総コスト: 軸あたり$10,000から$50,000。用途: 半導体検査、マスクアライメント、精密計測。
ボイスコイル(粗動) + 圧電スタック(微動): 極めて高速な整定を要する短ストロークアプリケーション(総可動域50 mm以下)向け。ボイスコイルがミリ秒オーダーの粗動位置決めを提供。圧電がマイクロ秒オーダーの微動補正を行う。用途: 原子間力顕微鏡、ナノインプリントリソグラフィ、ファストツールサーボ。
ステッパー(粗動) + 圧電モータ(微動): 長距離移動とサブマイクロメートル分解能を極端な速度なしで必要とするアプリケーション向けのコスト効率の高い組合せ。ステッパーが100 mm以上の粗動を提供。圧電モータが5から50 mmの微動で50から100 nmの分解能を提供。総コスト: 軸あたり$3,000から$10,000。用途: 自動顕微鏡、ファイバアライメント、光学テスト。
リニアモータ(粗動) + 圧電フレクシャ(微動): 最高性能の組合せ。リニアモータがメートル級の可動域を高速で提供。圧電がナノメートル級の最終位置決めを行う。半導体リソグラフィ、先進計測、高スループットナノ製造で使用される。
オーバーヘッド
マルチステージアーキテクチャには代償がある。システム高さの増加(ステージを垂直に積み重ね)、総可動質量の増加(粗動ステージは微動ステージを搬送する)、システム剛性の低下(ステージの積み重ねは単一ステージよりコンプライアントである)、制御の複雑化(二つのループ、クロスカップリング補償)、コスト増加(二つのステージ、二つのドライバ、二つのセンサ、インテグレーション工学)。このオーバーヘッドは、単一ステージ技術で全要件を満たせない場合にのみ正当化される。スタッキング戦略の詳細については多軸構成を参照。
実用的なガイドライン
技術別の経験則
圧電スタック: ストロークが200マイクロメートル以下、分解能が1 nm以下、剛性や帯域幅の要件が高い場合に使用。ナノポジショニング、アクティブ光学、マイクロメートルスケールの振動制御のデフォルトの選択肢。
増幅型圧電: 100から2,000マイクロメートルのストロークが必要で中程度の力(10から1,000 N)が許容される場合に使用。ファストツールサーボ、補償光学、アクティブ振動マウントに適する。剛性と帯域幅のペナルティを受け入れること。
圧電モータ: ストロークが1 mmを超え、分解能が1マイクロメートル以下で、ゼロ電力保持、非磁性動作、コンパクトサイズの恩恵があるアプリケーションに使用。詳細なガイダンスは技術選定フレームワークおよび圧電モーション技術の比較を参照。
ボイスコイル: 全ストロークにわたる力の一定性が重要で、ストロークが100 mm以下、連続電流を許容する熱バジェットがある場合に使用。アクティブ除振、オートフォーカス、力制御に最適。常に外部位置センサと組み合わせること。
サーボモータ(回転+ねじ): ストロークが100 mmを超え、力が100 Nを超え、1マイクロメートル以上の分解能で十分な場合に使用。長距離・高力アプリケーションの産業標準。
ダイレクトドライブリニアモータ: 長ストローク、高速、サブマイクロメートル分解能のすべてが同時に必要な場合に使用。相応の予算を確保すること。高価なシステムである。
ステッパーモータ: 軸あたりのコストを最小化する必要があり、5マイクロメートル以上の分解能で十分な場合に使用。ドライバの主張に関係なく、マイクロステッピングによるサブマイクロメートル性能は期待しないこと。
マルチステージの採用判断
以下の要件がある場合、マルチステージアーキテクチャを検討すべきである。
- 1 mm以上のストロークかつ100 nm以下の分解能
- 10 mm以上のストロークかつ50 N以上の力で1マイクロメートル以下の分解能
- 50 mmを超える可動域にわたるナノメートル級の精度
いずれの場合も、要求される性能空間を単一アクチュエータ技術でカバーすることはできない。マルチステージアプローチは妥協ではなく、正しいエンジニアリング上の解である。
最も一般的な仕様上の過ち
精密モーション仕様で最も頻度の高い過ちは、トレードオフを認識せずに三つのパラメータすべてに極限的な性能を要求することである。「200 mm可動域、10 nm分解能、500 N力、単一ステージ」という要件は、すべての仕様を実際には満たさないシステムか、真に要件を満たすマルチステージシステムより桁違いに高価なシステムの見積もりを招く。
要件を書く前に、本稿の性能エンベロープに対してアプリケーションをマッピングすべきである。要件がすべての単一技術エンベロープの外側に落ちるなら、最初からマルチステージシステムを仕様化すべきである。これによりメーカー評価の数か月の時間が節約され、仕様に合致するシステムが存在しないと判明する事態を防げる。
荷重・ストローク・分解能空間は、技術がきれいにセクターに分割された平坦な景色ではない。技術エンベロープが重なり、競合し、ギャップを残す三次元の空間である。その空間の形状と、それを生み出す物理を理解することが、あらゆる精密モーションアプリケーションに適切なアクチュエータを選択するための前提条件である。